science
L’astuce du fil d’Ariane de Hansel et Gretel inspire un système automatisé d’exploration de grottes sur Mars et au-delà
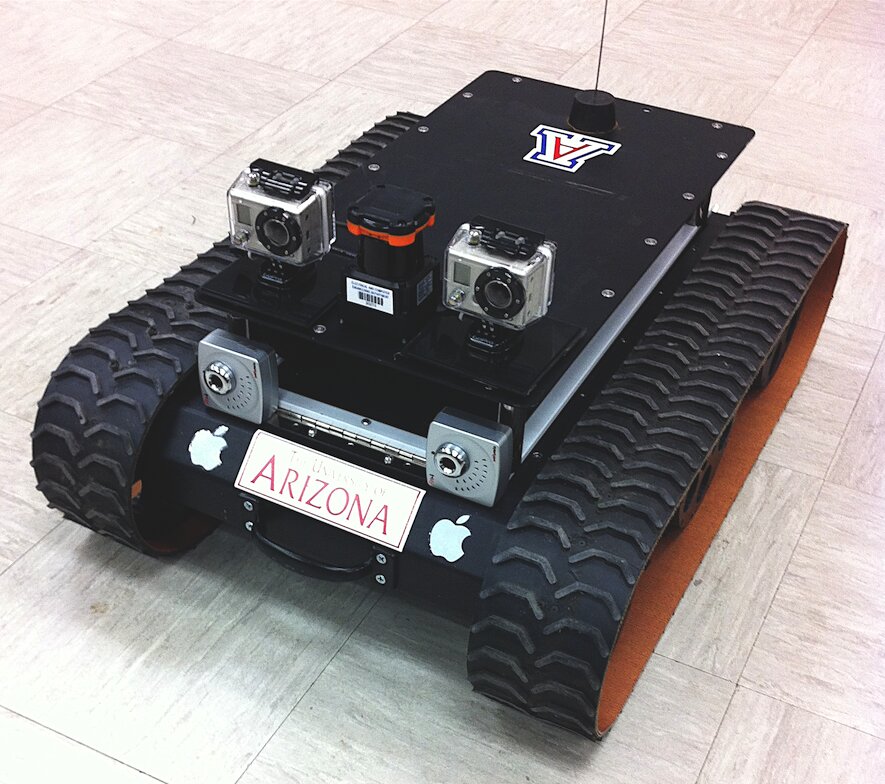
La recherche d’une maison sur Mars pourrait bientôt devenir une chose, et des chercheurs de l’Université de l’Arizona sont déjà en train d’explorer des biens immobiliers que les futurs astronautes pourraient utiliser comme habitats. Des chercheurs de l’UArizona College of Engineering ont développé une technologie qui permettrait à un troupeau de robots d’explorer les environnements souterrains d’autres mondes.
« Les tunnels de lave et les grottes feraient des habitats idéaux pour les astronautes car vous n’avez pas à construire de structure ; vous êtes protégé des radiations cosmiques nocives, donc tout ce que vous avez à faire est de le rendre agréable et confortable », a déclaré Wolfgang Fink, l’un des partenaires. Professeur de génie électrique et informatique à l’Arizona State University.
Fink est l’auteur principal d’un nouveau document de recherche Les avancées de la recherche spatiale Il détaille un réseau de communication qui relierait les rovers, les véhicules d’atterrissage sur les lacs et même les véhicules submersibles via un réseau dit à structure maillée, permettant aux machines de travailler ensemble en équipe, indépendamment de l’intervention humaine. Selon Fink et ses co-auteurs, cette approche pourrait aider à relever l’un des grands défis de la technologie spatiale de la NASA en aidant à surmonter la capacité limitée de la technologie actuelle à traverser en toute sécurité les environnements des comètes, des astéroïdes, des lunes et des corps planétaires. Se référant au conte de fées « Hansel et Gretel », les chercheurs ont nommé leur concept en instance de brevet le modèle de réseau de communications dynamiquement distribué de style Breadcrumb, ou DDCN.
Un conte de fées qui inspire l’avenir
« Si vous vous souvenez du livre, vous savez comment Hansel et Gretel ont laissé tomber des miettes de pain pour s’assurer qu’ils retrouveraient leur chemin », a déclaré Fink, fondateur et directeur du Visual and Independent Exploration Systems Research Lab à Caltech et U.A. « Dans notre scénario, les » fils d’Ariane « sont des capteurs miniatures placés à l’arrière des rovers, qui déploient les capteurs lorsqu’ils traversent une grotte ou un autre environnement souterrain. »
Surveillant constamment leur environnement et restant conscients de leur position dans l’espace, les rovers procèdent seuls, se connectant les uns aux autres via une connexion de données sans fil et déployant des nœuds de communication en cours de route. Une fois que le mobile détecte que le signal s’estompe mais qu’il est toujours à portée, il abandonne un nœud de communication, quelle que soit la distance déjà parcourue depuis qu’il a placé le dernier nœud.
« L’un des nouveaux aspects est ce que nous appelons la propagation opportuniste – l’idée que vous répandez des » miettes de pain « lorsque vous le devez et non selon un calendrier pré-planifié », a déclaré Fink.
Et pendant tout ce temps, aucune entrée du rover parent n’est nécessaire; Fink a ajouté que chaque rover affilié prendrait cette décision par lui-même. Fink a expliqué que le système pouvait fonctionner de deux manières. Dans l’un, le rover parent agit comme un récepteur passif, collectant les données renvoyées par les rovers d’exploration. Dans l’autre cas, le véhicule mère agit en tant que coordinateur, contrôlant les mouvements du rover comme un marionnettiste.
Les machines prennent le relais
Le nouveau concept correspond à sondage noté Le modèle que Fink et ses collègues ont créé au début des années 2000. Cette idée envisage une équipe de robots opérant à différents niveaux de commande – par exemple, un orbiteur contrôlant un ballon, qui à son tour contrôle un ou plusieurs atterrisseurs ou rovers sur Terre. Déjà, les missions spatiales ont adopté le concept, beaucoup avec la participation de chercheurs de l’UArizona. Par exemple, sur Mars, Creativity est piloté par le rover Perseverance, qui est un hélicoptère robotique.
Un concept pour une autre mission, qui n’a finalement pas été retenue pour financement, proposait d’envoyer un orbiteur porteur de ballons et un atterrisseur lacustre pour étudier l’une des mers d’hydrocarbures sur Titan, la lune de Saturne. L’approche du chemin de navigation pousse l’idée un peu plus loin en fournissant une plate-forme robuste qui permet aux explorateurs robotiques d’opérer sous terre ou même immergés dans des environnements liquides. Fink a déclaré que de telles hordes de robots individuels et autonomes pourraient également aider aux efforts de recherche et de sauvetage à la suite de catastrophes naturelles sur Terre.
Le plus grand défi, a déclaré Fink, en plus de faire entrer les véhicules dans l’environnement souterrain en premier lieu, est de récupérer les données qu’ils enregistrent sous terre et de les ramener à la surface. Le concept DDCN permet à une équipe de rovers de naviguer même dans des environnements souterrains complexes sans perdre le contact avec la « mère rover » en surface. Équipés d’un système de détection et de télémétrie de la lumière, ou LIDAR, ils peuvent même tracer des passages de grottes dans les trois dimensions, contrairement aux drones que l’on peut voir en train de repérer des vaisseaux spatiaux extraterrestres dans le film « Prométhée ».
« Une fois déployés, nos capteurs créent automatiquement un réseau maillé non dirigé, ce qui signifie que chaque nœud se met à jour sur chaque nœud qui l’entoure », a déclaré Fink, qui a expliqué pour la première fois le concept DDCN dans une proposition à la NASA en 2019.
« Ils peuvent basculer entre eux et compenser les points morts et les interruptions de signal », a ajouté Mark Tarbell, co-auteur de l’article et chercheur principal du laboratoire de Fink. « Si certains d’entre eux meurent, il y a toujours une communication entre les nœuds restants, de sorte que le vaisseau mère ne perd jamais le contact avec le nœud le plus éloigné du réseau. »
mission sans retour
Le réseau robuste de nœuds de communication garantit que toutes les données collectées par les explorateurs robotiques reviennent au rover parent en surface. Ainsi, il n’est pas nécessaire de récupérer les bots une fois qu’ils ont fait leur travail, a déclaré Fink, qui a popularisé l’idée d’utiliser des ensembles de sondes de surface robotiques mobiles et jetables dès 2014.
« Il a été conçu pour être consommable », a-t-il déclaré. « Au lieu de gaspiller des ressources pour les faire entrer dans la grotte et en ressortir, il est plus logique de les faire aller aussi loin que possible et de les laisser derrière eux une fois qu’ils ont accompli leur mission, à court d’énergie ou succombé à un environnement hostile. »
« L’approche du réseau de communication présentée dans ce nouvel article a le potentiel d’annoncer une nouvelle ère de découvertes planétaires et astrobiologiques », a déclaré Dirk Schultz-Makuch, président de la Société allemande d’astrobiologie et auteur de plusieurs publications sur la vie extraterrestre. « Cela nous permet enfin d’explorer les grottes de tubes de lave martiennes et les océans souterrains des lunes glacées – des endroits où la vie extraterrestre pourrait exister. »
Le concept proposé « porte de la magie », selon Victor Becker, professeur d’hydrologie, de sciences de l’atmosphère et de sciences de la Terre et des planètes à l’Université de l’Arizona. « Les découvertes scientifiques les plus étonnantes se produisent lorsque les progrès technologiques permettent d’accéder pour la première fois à un objet ou à un lieu et aux moyens de communiquer ce qui est ainsi découvert à des esprits créatifs cherchant à comprendre », a déclaré Baker.
Explorez des mondes océaniques cachés
Dans les endroits où des robots submersibles sont nécessaires, le système pourrait consister en une sonde – soit flottant sur un lac, comme sur Titan, soit posée sur la glace au-dessus d’un océan souterrain comme Europa – connectée à un sous-marin, par exemple via un long câble. Ici, les nœuds de connexion agissent comme des répéteurs, ce qui amplifie le signal à intervalles réguliers pour éviter qu’il ne se dégrade. Plus important encore, a noté Fink, les nœuds ont la capacité de collecter eux-mêmes des données – par exemple mesurer la pression, la salinité, la température et d’autres paramètres chimiques et physiques – et d’ingérer les données dans le câble qui se connecte à l’atterrisseur.
« Imaginez que vous vous rendiez jusqu’en Europe, fondiez sur des kilomètres de glace et atteigniez l’océan souterrain, où vous vous retrouvez entouré de vie extraterrestre, mais vous n’avez aucun moyen de ramener les données à la surface », a-t-il déclaré. a dit. C’est le scénario que nous devons éviter. »
Après avoir développé des rovers et une technologie de communication, le groupe de Fink construit actuellement le mécanisme réel par lequel les rovers déploieront des nœuds de communication.
Fink a déclaré: « Fondamentalement, nous allons apprendre à ‘Hansels’ et ‘Gretels’ comment déposer des miettes de pain afin qu’elles s’ajoutent à un réseau de communication maillé fonctionnel.
Plus d’information:
Wolfgang Fink et al., Un modèle de réseau de communication de style Hansel & Gretel à déploiement dynamique utilisant la structure du réseau pour explorer les planètes souterraines, Les avancées de la recherche spatiale (2023). DOI : 10.1016/j.asr.2023.02.012

« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »
science
La sonde spatiale Voyager 1 transmet à nouveau des données après que la NASA les a détectées à distance à 24 milliards de kilomètres – The Irish Times
:quality(70):focal(955x387:965x397)/cloudfront-eu-central-1.images.arcpublishing.com/irishtimes/F25H742JEFAG6EW6JFDXDFWGZQ.jpg)
Le vaisseau spatial le plus éloigné de la Terre, Voyager 1, a recommencé à communiquer correctement avec la NASA après que les ingénieurs ont travaillé pendant des mois pour réparer à distance la sonde vieille de 46 ans.
Le Jet Propulsion Laboratory de la NASA, qui construit et exploite le vaisseau spatial robotique de l'agence, a déclaré en décembre que la sonde, située à plus de 24 milliards de kilomètres, envoyait un code absurde à la Terre.
Dans une mise à jour publiée lundi, le JPL a annoncé que l’équipe de la mission avait pu « après quelques investigations innovantes » obtenir des données utilisables sur la santé et l’état des systèmes d’ingénierie de Voyager 1. « La prochaine étape consiste à permettre au vaisseau spatial de commencer à apporter les données scientifiques. dos. » Elle a ajouté que malgré le défaut, Voyager 1 fonctionnait normalement depuis le début.
Lancé en 1977, Voyager 1 a été conçu dans le but principal d'effectuer des études rapprochées de Jupiter et de Saturne au cours d'une mission de cinq ans. Cependant, son voyage s'est poursuivi et le vaisseau spatial approche désormais d'un demi-siècle d'exploitation.
Voyager 1 a pénétré dans l'espace interstellaire en août 2012, ce qui en fait le premier objet fabriqué par l'homme à quitter le système solaire. Il roule actuellement à une vitesse de 60 821 km/h.
Le dernier problème était lié à l'un des trois ordinateurs à bord du vaisseau spatial, chargé de remplir les données scientifiques et techniques avant de les envoyer sur Terre. Incapable de réparer une puce cassée, l'équipe du JPL a décidé de déplacer le code endommagé ailleurs, une tâche difficile compte tenu de la technologie obsolète.
Les ordinateurs de Voyager 1 et de sa sœur Voyager 2 disposaient de moins de 70 kilo-octets de mémoire au total, soit l'équivalent d'une image informatique à basse résolution. Ils utilisent de vieilles bandes numériques pour enregistrer des données.
La réparation a été envoyée depuis la Terre le 18 avril, mais il a fallu deux jours pour évaluer si elle a réussi, car il faut environ 22 heures et demie pour que le signal radio atteigne Voyager 1 et 22 heures supplémentaires pour que la réponse revienne sur Terre. .
« Lorsque l'équipe de vol de la mission a reçu une réponse du vaisseau spatial le 20 avril, elle a constaté que la modification fonctionnait », a déclaré le JPL.
Parallèlement à son annonce, le JPL a publié une photo des membres de l'équipe de vol du Voyager applaudissant et applaudissant dans une salle de conférence après avoir reçu des données utilisables, avec des ordinateurs portables, des cahiers et des cookies sur la table devant eux.
L'astronaute canadien à la retraite Chris Hadfield, qui a participé à deux missions de navette spatiale et a servi comme commandant de la Station spatiale internationale, a comparé la mission du JPL à l'entretien longue distance d'une vieille voiture.
« Imaginez qu'une puce informatique se brise dans votre voiture en 1977. « Imaginez maintenant qu'elle se trouve dans l'espace interstellaire, à 25 milliards de kilomètres de là », a écrit Hadfield.
Voyager 1 et 2 ont fait de nombreuses découvertes scientifiques, notamment des enregistrements détaillés de Saturne et la révélation que Jupiter possède également des anneaux, ainsi qu'une activité volcanique active sur l'une de ses lunes, Io. Des sondes ont ensuite découvert 23 nouvelles lunes autour des planètes extérieures.
Parce que leur trajectoire les éloigne du Soleil, les sondes du Voyager sont incapables d'utiliser des panneaux solaires et convertissent à la place la chaleur générée par la désintégration radioactive naturelle du plutonium en électricité pour alimenter les systèmes du vaisseau spatial.
La NASA espère continuer à collecter des données des deux vaisseaux spatiaux Voyager pendant encore plusieurs années, mais les ingénieurs s'attendent à ce que les sondes soient trop hors de portée pour communiquer d'ici une décennie environ, en fonction de la quantité d'énergie qu'elles peuvent générer. Voyager 2 est un peu en retard sur son jumeau et se déplace un peu plus lentement.
Dans environ 40 000 ans, les deux sondes passeront relativement près, en termes astronomiques, de deux étoiles. Voyager 1 s'approchera à moins de 1,7 années-lumière d'une étoile de la constellation de la Petite Ourse, tandis que Voyager 2 s'approchera à une distance similaire d'une étoile appelée Ross 248 dans la constellation d'Andromède. -Gardien
« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »
science
Voyager 1 renvoie des données après que la NASA a réparé à distance une sonde vieille de 46 ans | espace
Le vaisseau spatial le plus éloigné de la Terre, Voyager 1, a recommencé à communiquer correctement avec la NASA après que les ingénieurs ont travaillé pendant des mois pour réparer à distance la sonde vieille de 46 ans.
Le Jet Propulsion Laboratory (JPL) de la NASA, qui construit et exploite le vaisseau spatial robotique de l'agence, il a dit en décembre Que la sonde – à plus de 24 milliards de kilomètres de distance – envoyait un code absurde à la Terre.
dans Mise à jour publiée lundiLe JPL a annoncé que l'équipe de la mission a pu « après quelques investigations innovantes » obtenir des données utilisables sur la santé et l'état des systèmes d'ingénierie de Voyager 1. « La prochaine étape consiste à permettre au vaisseau spatial de recommencer à renvoyer des données scientifiques », a déclaré le JPL. Elle a ajouté que malgré le défaut, Voyager 1 fonctionnait normalement depuis le début.
Lancé en 1977, Voyager 1 a été conçu dans le but principal d'effectuer des études rapprochées de Jupiter et de Saturne au cours d'une mission de cinq ans. Cependant, son voyage s'est poursuivi et le vaisseau spatial approche désormais d'un demi-siècle d'exploitation.
Voyager 1 a pénétré dans l'espace interstellaire en août 2012, ce qui en fait le premier objet fabriqué par l'homme à quitter le système solaire. Il roule actuellement à 37 800 mph (60 821 km/h).
Le dernier problème était lié à l'un des trois ordinateurs à bord du vaisseau spatial, chargé de remplir les données scientifiques et techniques avant de les envoyer sur Terre. Incapable de réparer une puce cassée, l'équipe du JPL a décidé de déplacer le code endommagé ailleurs, une tâche difficile compte tenu de la technologie obsolète.
Les ordinateurs de Voyager 1 et de sa sœur Voyager 2 disposaient de moins de 70 kilo-octets de mémoire au total, soit l'équivalent d'une image informatique à basse résolution. Ils utilisent de vieilles bandes numériques pour enregistrer des données.
Le correctif a été envoyé depuis la Terre le 18 avril, mais il a fallu deux jours pour évaluer s'il a réussi, car il faut environ 22 heures et demie pour qu'un signal radio atteigne Voyager 1 et encore 22 heures et demie pour la réponse à retourner dans l'espace. Atterrir. « Lorsque l'équipe de vol de la mission a reçu une réponse du vaisseau spatial le 20 avril, elle a constaté que la modification fonctionnait », a déclaré le JPL.
Voyager 1 et 2 ont fait de nombreuses découvertes scientifiques, notamment des enregistrements détaillés de Saturne et la révélation que Jupiter possède également des anneaux, ainsi qu'une activité volcanique active sur l'une de ses lunes, Io. Des sondes ont ensuite découvert 23 nouvelles lunes autour des planètes extérieures.
Parce que leur trajectoire les éloigne du Soleil, les sondes du Voyager sont incapables d'utiliser des panneaux solaires et convertissent à la place la chaleur générée par la désintégration radioactive naturelle du plutonium en électricité pour alimenter les systèmes du vaisseau spatial.
Dans environ 40 000 ans, les deux sondes passeront relativement près, en termes astronomiques, de deux étoiles. Voyager 1 s'approchera à moins de 1,7 années-lumière d'une étoile de la constellation de la Petite Ourse, tandis que Voyager 2 s'approchera à une distance similaire d'une étoile appelée Ross 248 dans la constellation d'Andromède.
« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »
science
La mesure la plus précise jamais réalisée nous rapproche de la véritable masse de la particule « fantôme ».
La masse au repos des neutrinos fantômes est l’une des quantités les plus recherchées en physique des particules et les scientifiques sont sur le point de la localiser, grâce à une nouvelle expérience menée par des chercheurs de l’Institut Max Planck de physique nucléaire en Allemagne.
Si la masse des neutrinos est connue, cela pourrait ouvrir la porte à une physique au-delà du modèle standard de la physique des particules, qui décrit toutes les forces et particules élémentaires connues de l’univers.
Dire que les neutrinos sont étranges est un euphémisme. Autrefois suggéré qu'il n'y avait pas de masse du tout, il est désormais clair que cette particule à peine existante est en réalité composée de trois types en un, avec des identités oscillant dans un étrange flou quantique alors qu'elle se précipite dans l'espace. Cette faible identité signifie la masse, qui Il se présente sous différentes formesétalé sur l'apparence changeante du neutrino.
Parce qu’ils sont si légers et étranges, les neutrinos ne respectent peut-être pas les mêmes règles que les autres particules. L’ajout précis d’un échantillon de leurs masses incroyablement petites pourrait aider à confirmer et à exclure de nouveaux modèles en physique des particules.
Cependant, les physiciens ne peuvent pas peser des groupes de neutrinos stationnaires comme des raisins sur une balance. Au lieu de, Ils peuvent juste Confirmer l'existence Ces particules subatomiques en examinant leurs interactions avec d'autres particules, ou En mesurant les produits Leur décadence. C'est peut-être juste la particule Présent pour le plus bref instant Mais à ce moment-là, il laisse sa marque, ou une trace, à partir de laquelle les physiciens peuvent déduire la masse.
Cependant, sans charge et pratiquement sans force gravitationnelle, les neutrinos n’exercent que les forces les plus faibles sur les autres particules. En fait, des milliards de neutrinos traversent votre corps en ce moment, la plupart provenant du Soleil, mais… Ils interagissent rarement Avec nous.
Cependant, ce n’est pas parce qu’ils ont peu d’effet sur les autres particules subatomiques que les neutrinos ne constituent pas une partie essentielle de la matière. qu'ils Les molécules les plus abondantes Qui ont une masse dans l'univers, et savoir ce qui donne à ces différences entre les neutrinos des masses si petites, non nulles, peut aider les physiciens à résoudre ou à comprendre certaines des divergences du modèle standard que présentent les neutrinos dans la façon dont ils oscillent.
Les physiciens améliorent régulièrement leurs meilleures estimations des limites supérieures des masses individuelles et collectives des neutrinos en utilisant différentes méthodes. La mesure la plus précise à ce jour d'une « saveur » appelée neutrino électronique a révélé qu'elle ne pouvait pas dépasser 0,8 MeV. Traduisant cela en masse en termes de 1 kilogramme (ou 2,2 livres), cela équivaut au poids de quatre raisins secs par rapport au soleil.
L'estimation la plus récente a été déterminée en février 2022 par l'expérience Karlsruhe Tritium Neutrino (Catherine) en Allemagne, a été déduite de la pulvérisation d'électrons et de neutrinos émise comme une forme super-lourde de désintégration de l'hydrogène.
Une autre façon d'obtenir la masse d'un neutrino, aussi légère soit-elle, consiste à étudier ce qui se passe lorsque le noyau atomique de l'isotope artificiel holmium-163 absorbe un électron de sa coque interne. En conséquence, un proton se transforme en neutron, du dysprosium-163 est produit et un neutrino est libéré.
Les physiciens peuvent alors mesurer l'énergie totale libérée lors de cette désintégration à l'aide d'un type de calorimètre et en déduire la masse du neutrino « manquant » qui a volé dans l'éther en se basant sur la masse totale de l'atome et la célèbre équation d'Einstein, E = mc2.2Où masse et énergie sont égales.
Ceci est calculé comme ce qu'on appelle valeur x: Une différence d'énergie qui peut se traduire par la masse « perdue » de la somme des particules atomiques après une réaction de désintégration. Cette différence de masse est interprétée comme un neutrino.
Cependant, les atomes d'or dans lesquels l'holmium-163 est présent peuvent affecter cette réaction de désintégration, Il explique Christoph Schweiger, physicien à l'Institut Max Planck de physique nucléaire et auteur principal de la nouvelle étude.
« Il est donc important de mesurer la valeur Q le plus précisément possible à l'aide d'une méthode alternative et de la comparer à la valeur déterminée par calorimétrie afin de détecter d'éventuelles sources d'erreur systématiques. » Il dit.
Pour ce faire, Schweiger et ses collègues ont mis en place une expérience combinant cinq soi-disant Pièges à écrireempilés les uns sur les autres à l'intérieur d'un aimant supraconducteur placé sous vide et immergé dans de l'hélium liquide à environ 4 degrés Kelvin (-269,1 degrés Celsius ou -452,5 degrés Fahrenheit).
Tous ces efforts contribuent à protéger l’équipement afin qu’il soit suffisamment sensible pour capturer les particules dans les pièges de Penning et mesurer d’infimes différences d’énergie entre les ions chargés d’holmium-163 et de dysprosium-163.
« Avec un Airbus A-380 doté d'une charge utile maximale, vous pouvez utiliser cette sensibilité pour déterminer si une seule goutte d'eau s'est posée dessus », a déclaré Schweiger. Il dit.
En fait, les chercheurs ont mesuré les ions holmium-163 entrants et les ions dysprosium-163 résultants pour arriver à une valeur Q de 2863,2 ± 0,6 eVC.-2qui est 50 fois plus précise que la tension précédente, qui atteignait une valeur de 2833 ± 34 V C.-2.
L’utilisation d’une valeur Q plus précise et mesurée de manière indépendante en conjonction avec d’autres résultats expérimentaux « est essentielle pour évaluer les incertitudes systématiques dans la détermination de la masse des neutrinos », expliquent Schweiger et ses collègues. Écrire dans leur article publié.
Bien qu'il ne s'agisse que d'une pièce du puzzle, une résolution améliorée dans des mesures telles que Q peut être combinée à un large éventail de méthodes pour comprendre pourquoi les fantômes étranges et chatoyants du monde des particules se comportent comme des esprits frappeurs.
L'étude a été publiée dans Physique naturelle.
« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »
-

 entertainment2 ans ago
entertainment2 ans agoDécouvrez les tendances homme de l’été 2022
-

 Top News2 ans ago
Top News2 ans agoFestival international du film de Melbourne 2022
-
 Tech1 an ago
Tech1 an agoVoici comment Microsoft espère injecter ChatGPT dans toutes vos applications et bots via Azure • The Register
-
science2 ans ago
Les météorites qui composent la Terre se sont peut-être formées dans le système solaire externe
-
science3 ans ago
Écoutez le « son » d’un vaisseau spatial survolant Vénus
-
Tech2 ans ago
F-Zero X arrive sur Nintendo Switch Online avec le multijoueur en ligne • Eurogamer.net
-
entertainment1 an ago
Seven révèle son premier aperçu du 1% Club
-
entertainment1 an ago
Centenaire des 24 Heures – La musique live fournit une bande-son pour la course