science
Des programmes de formation spécialisés utilisant des dispositifs d’amélioration sensorielle peuvent empêcher les astronautes d’être désorientés dans l’espace.

Même au sol, entre 1993 et 2013, la désorientation spatiale a entraîné la perte de 65 avions, 2,32 milliards de dollars de dégâts et 101 morts aux États-Unis.
La technologie portable pourrait-elle améliorer les sens des astronautes et leur permettre de surmonter leurs limites ? Capteurs biologiques? Quel type de formation peut établir un lien plus profond entre l’astronaute et la technologie portable, afin que les astronautes puissent s’appuyer sur la technologie lorsqu’ils ne peuvent pas faire confiance à leurs sens ?
Je suis chercheur au laboratoire d’orientation spatiale Ashton Graybeal de l’université Brandeis. Avec mes collègues Alexander Panek, James Lackner et Paul Desio, j’étudie l’amélioration sensorielle et la désorientation spatiale, c’est-à-dire lorsque les astronautes et les pilotes perdent la idée de la direction dans laquelle ils se dirigent.
Dans une recherche publiée en novembre 2023 dans la revue Frontiers in Physiology, nous avons déterminé si les vibrateurs – de petits appareils vibrants placés sur la peau – pouvaient améliorer les performances des participants placés dans une situation désorientante simulant un vol spatial. Nous avons également examiné quel type de formation pourrait améliorer la communication homme-machine.
Les vibrateurs transmettent des informations via les récepteurs tactiles du système somatosensoriel plutôt que via le système visuel. Ils ont déjà aidé des pilotes à piloter des hélicoptères et des avions.
Lorsque les pilotes sont désorientés, leur système visuel est souvent submergé d’informations. Les vibrateurs peuvent aider car ils envoient des signaux tactiles plutôt que des signaux visuels.
Créer un cas analogique pour les vols spatiaux
Lors de notre première expérience, nous voulions voir si l’utilisation de vibrateurs améliorerait la capacité d’un participant à se stabiliser dans une situation délicate de vol spatial.
Nous avons attaché les participants à une machine gyroscopique multi-axes, une machine contenant une chaise programmée pour se comporter comme un pendule inversé. Comme un crayon qui descend vers la gauche ou la droite lorsque vous essayez de l’équilibrer sur le bout de votre doigt, un gyroscope multi-axes s’incline vers la gauche ou la droite. Les participants utilisaient le joystick pour essayer de s’équilibrer et de maintenir la chaise droite.
Nous avons bandé les yeux des participants car la désorientation spatiale se produit souvent lorsque les pilotes ne peuvent pas voir, par exemple lorsqu’ils volent de nuit ou à travers les nuages.
Sur Terre, de petits organes de l’oreille interne appelés otolithes aident les gens à maintenir leur équilibre en détectant l’inclinaison du corps par rapport à une position verticale, également appelée gravité verticale. dans espace Surtout lors de déplacements gravitationnels, comme lors d’un atterrissage sur une planète ou sur la lune, les informations gravitationnelles détectées par les otolithes sont très différentes de celles sur Terre. Cela peut prêter à confusion.
De plus, les vols spatiaux de longue durée modifieront la façon dont le cerveau interprète les signaux émis par les otolithes. Cela peut également prêter à confusion lors de l’atterrissage.
Dans les conditions terrestres analogiques, destinées à servir de contrôle de comparaison avec les conditions de vol spatial que nous avons testées, les participants étaient assis dans le gyroscope multi-axes et utilisaient le joystick pour se stabiliser autour du point d’équilibre. Le point d’équilibre était en position verticale ou en position gravitationnelle perpendiculaire.
Étant donné que les otolithes peuvent détecter l’inclinaison d’une ligne verticale de gravité, les participants ont toujours eu une bonne idée de leur orientation et de l’emplacement du point d’équilibre. Nous avons appelé cet état « l’état analogique de la Terre » car ils peuvent utiliser des signaux gravitationnels pour faire le travail. Chaque participant a appris cela et a amélioré ses performances au fil du temps.
Ensuite, dans les conditions analogiques du vol spatial, le gyroscope multi-axes a poussé les participants vers l’arrière de 90 degrés. Le point d’équilibre était toujours au centre et le gyroscope multi-axes était programmé pour s’incliner à gauche ou à droite lorsque les participants étaient sur le dos.
Dans le cas de la Terre, le point d’équilibre était aligné avec l’arbre vertical, il était donc facile d’utiliser des otolithes pour déterminer son inclinaison. Cependant, dans les conditions de vol spatial, les participants n’étaient plus inclinés par rapport à la colonne de gravité, car ils étaient toujours sur le dos. Ainsi, même si le point d’équilibre qu’ils essayaient de trouver était le même, ils ne pouvaient plus utiliser la gravité pour déterminer à quelle distance ils étaient inclinés par rapport au point d’équilibre.
De même, les astronautes ont des signaux gravitationnels minimes lors de leur premier atterrissage. Dans le cas de nos vols spatiaux, les participants ont montré de très mauvaises performances et ont eu des taux élevés de perte de contrôle.
Pour chacun des treize participants du groupe expérimental, nous avons attaché quatre vibrateurs à chaque bras. Plus le participant est éloigné du point d’équilibre, plus les vibrateurs du même côté vibrent.
Nous avons constaté que le retour vibratoire aidait à améliorer les performances en matière de désorientation des vols spatiaux. Mais cela a également conduit à un sentiment de décalage entre la fausse perception qu’a le participant de son orientation et son orientation réelle, comme l’indiquent les shakers.
En raison de ce conflit, les participants au vol spatial n’ont pas obtenu de résultats aussi bons que ceux sur Terre.
Étonnamment, même le fait de savoir qu’ils étaient confus et qu’ils faisaient état d’un niveau élevé de confiance dans les shakers n’était pas suffisant pour permettre aux gens de continuer à apprendre et d’améliorer leurs performances. Cela suggère que la confiance cognitive, ou le niveau de confiance autodéclaré, peut différer de la confiance instinctive – et la confiance cognitive à elle seule ne garantit pas que les gens pourront compter sur des shakers lorsqu’ils sont désorientés.
Créer un lien entre l’humain et l’appareil
Des recherches antérieures dans le domaine de la substitution sensorielle ont montré que permettre aux participants d’explorer et de jouer librement avec l’appareil pendant l’entraînement crée un lien entre l’humain et l’appareil.
Lors de notre première expérience, nous avons donné aux participants le temps d’explorer le fonctionnement de l’appareil. Nous leur avons donné 40 minutes pour explorer le retour vibratoire dans l’état fondamental la veille de les tester dans des conditions de vol spatial. Bien que cela ait aidé les participants à mieux performer que ceux qui n’avaient pas de vibrateurs, leurs améliorations étaient modestes et ces participants n’ont montré aucune amélioration supplémentaire de leurs performances après avoir passé 40 minutes dans des conditions de vol spatial.
Alors, pourquoi cette exploration gratuite n’était-elle pas suffisante pour notre cas de test mais suffisante pour d’autres expériences ? L’une des raisons peut être que la majorité des études précédentes sur le renforcement sensoriel ont fait l’objet d’une formation et de tests menés dans le même environnement. Cependant, les astronautes recevront probablement leur formation sur Terre avant d’être dans l’espace, où leurs informations sensorielles seront très différentes.
Pour déterminer si une formation spécialisée pouvait conduire à de meilleurs résultats, nous avons fait suivre à un autre groupe de participants un programme de formation.
Les participants ont passé la première journée en mode analogique au sol, où ils devaient se stabiliser tout en recherchant des points d’équilibre cachés différents du mode vertical ou gravitationnel. Afin de trouver le point d’équilibre caché, ils ont dû abandonner leur désir de se conformer au statu quo et se concentrer sur les shakers, qui indiquent l’emplacement du point d’équilibre.
Lorsque ce groupe a été testé le deuxième jour dans des conditions analogiques de vol spatial, ils ont obtenu de bien meilleurs résultats que le groupe qui avait les shakers mais n’a pas reçu le programme de formation. Nos résultats suggèrent que la simple exposition à des dispositifs d’amélioration sensorielle ne constituera pas une formation suffisante pour que les astronautes puissent compter sur l’appareil lorsqu’ils ne peuvent pas compter sur leurs sens.
En outre, la confiance cognitive dans l’appareil peut ne pas être suffisante pour garantir la fiabilité de celui-ci. Au lieu de cela, les astronautes auront besoin d’une formation spécialisée qui nécessite de se déconnecter d’un sens et de se concentrer sur les commentaires de l’appareil.

« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »
science
Un nouvel alliage choque les scientifiques par sa résistance et sa dureté presque impossibles

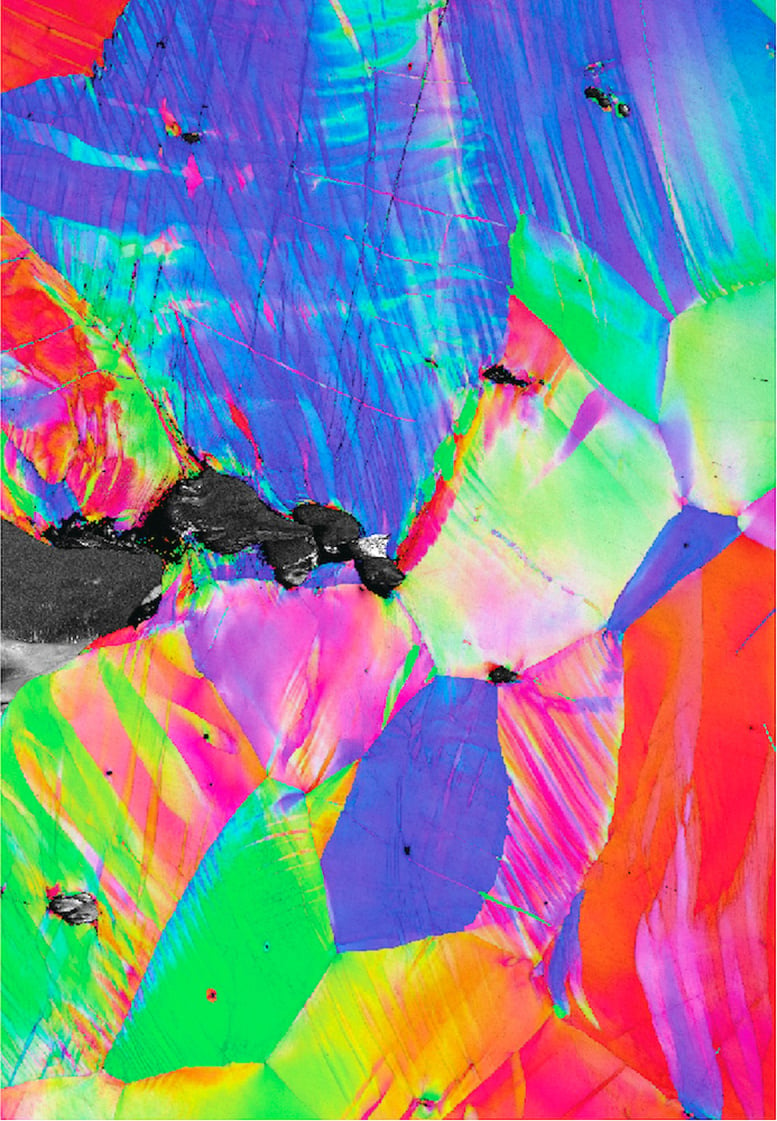
Carte de la structure cristalline de l'alliage obtenue à partir de la diffraction par rétrodiffusion des électrons au microscope électronique à balayage. Chaque couleur représente une partie du cristal où la structure répétitive change d'orientation 3D. Crédit : Laboratoire de Berkeley
Des chercheurs ont découvert un minéral inhabituel Alliage Il ne se fissurera pas à des températures extrêmes en raison de la flexion ou de la flexion des cristaux de l'alliage au niveau atomique.
Un alliage métallique composé de niobium, de tantale, de titane et de hafnium a choqué les scientifiques des matériaux par sa résistance et sa ténacité étonnantes à des températures extrêmement chaudes et froides, une combinaison de propriétés qui semblaient jusqu'à présent presque impossibles à obtenir. Dans ce contexte, la résistance est définie comme la quantité de force qu'un matériau peut supporter avant d'être déformé de manière permanente par rapport à sa forme d'origine, et la ténacité est sa résistance à la rupture (fissuration). La résilience de l'alliage à la flexion et à la rupture dans un large éventail de conditions pourrait ouvrir la porte à une nouvelle classe de matériaux pour les moteurs de nouvelle génération, capables de fonctionner plus efficacement.
L'équipe, dirigée par Robert Ritchie du Lawrence Berkeley National Laboratory (Berkeley Laboratory) et de l'UC Berkeley, en collaboration avec des groupes dirigés par les professeurs Deran Apelian de l'UC Irvine et Enrique Lavernia de la Texas A&M University, a découvert puis découvert les propriétés étonnantes de l'alliage. . Comment résultent-ils des interactions dans la structure atomique ? Leurs travaux ont été décrits dans une étude récemment publiée dans la revue les sciences.
« L'efficacité de la conversion de la chaleur en électricité ou en propulsion est déterminée par la température à laquelle le carburant est brûlé : plus il est chaud, mieux c'est. Cependant, la température de fonctionnement est limitée par les matériaux structurels auxquels il doit résister. » Nous avons épuisé la possibilité d’améliorer les matériaux que nous utilisons actuellement à haute température, et il existe un grand besoin de nouveaux matériaux métalliques. C’est ce que promet cet alliage.
L'alliage dans cette étude appartient à une nouvelle classe de métaux connus sous le nom d'alliages résistants aux températures élevées ou moyennes (RHEA/RMEA). La plupart des métaux que nous voyons dans les applications commerciales ou industrielles sont des alliages constitués d'un métal parent mélangé à de petites quantités d'autres éléments, mais les RHEA et les RMEA sont fabriqués en mélangeant des quantités presque égales d'éléments métalliques avec des températures de fusion très élevées, ce qui leur confère des propriétés encore uniques. . Les scientifiques le découvrent. Le groupe de Ritchie étudie ces alliages depuis plusieurs années en raison de leur potentiel pour les applications à haute température.
Cette carte de structure du matériau montre des bandes de réseau qui se forment près du fond de fissure lorsque les fissures se propagent (de gauche à droite) dans l'alliage à 25°C, température ambiante. Réalisé à l'aide d'un détecteur de diffraction de rétrodiffusion d'électrons dans un microscope électronique à balayage. Crédit : Laboratoire de Berkeley
« Notre équipe a déjà effectué des travaux sur les RHEA et les RMEA et a découvert que ces matériaux sont très résistants, mais ont généralement une très faible ténacité à la rupture, c'est pourquoi nous avons été choqués lorsque cet alliage a montré une ténacité exceptionnellement élevée », a déclaré le co-auteur. Puneet Kumar, chercheur postdoctoral du groupe.
Selon Cook, la plupart des RMEA ont une ténacité inférieure à 10 MPa, ce qui en fait l'un des métaux les plus fragiles de tous. Les meilleurs aciers cryogéniques, spécialement conçus pour résister à la casse, sont environ 20 fois plus résistants que ces matériaux. Cependant, le niobium, le tantale, le titane et le hafnium (Nb45Ta25T15Haute fréquence15) L'alliage RMEA était capable de surpasser même l'acier cryogénique, enregistrant des performances plus de 25 fois supérieures à celles du RMEA typique à température ambiante.
Mais les moteurs ne fonctionnent pas à température ambiante. Les scientifiques ont évalué la résistance et la durabilité à cinq températures totales : -196°C (température de l'azote liquide), 25°C (température ambiante), 800°C, 950°C et 1 200°C. Cette dernière température est environ 1/5 de la température de la surface du Soleil.
L’équipe a découvert que l’alliage présente sa plus grande résistance au froid et s’affaiblit légèrement à mesure que la température augmente, mais présente toujours des chiffres impressionnants sur une large plage. La ténacité à la rupture, calculée à partir de la force nécessaire pour propager une fissure existante dans un matériau, était élevée à toutes les températures.
Révéler les arrangements atomiques
Presque tous les alliages métalliques sont cristallins, ce qui signifie que les atomes contenus dans le matériau sont disposés en unités répétitives. Cependant, aucun cristal n’est parfait, ils contiennent tous des imperfections. Le défaut le plus important qui se déplace est appelé dislocation, c'est-à-dire un plan imparfait d'atomes dans le cristal. Lorsqu’une force est appliquée au métal, plusieurs dislocations se déplacent pour s’adapter au changement de forme.
Par exemple, lorsque vous pliez un trombone en aluminium, le mouvement des dislocations à l’intérieur du trombone s’adapte au changement de forme. Cependant, le mouvement des dislocations devient plus difficile à basse température et, par conséquent, de nombreux matériaux deviennent cassants à basse température car les dislocations ne peuvent pas bouger. C'est pourquoi la coque en acier du Titanic s'est brisée lorsqu'elle a heurté un iceberg. Les éléments à haute température de fusion et leurs alliages poussent cela à l'extrême, nombre d'entre eux restant cassants même jusqu'à 800°C. Cependant, cette RMEA va à l’encontre de la tendance, en résistant aux interruptions même à des températures aussi basses que l’azote liquide (-196°C).
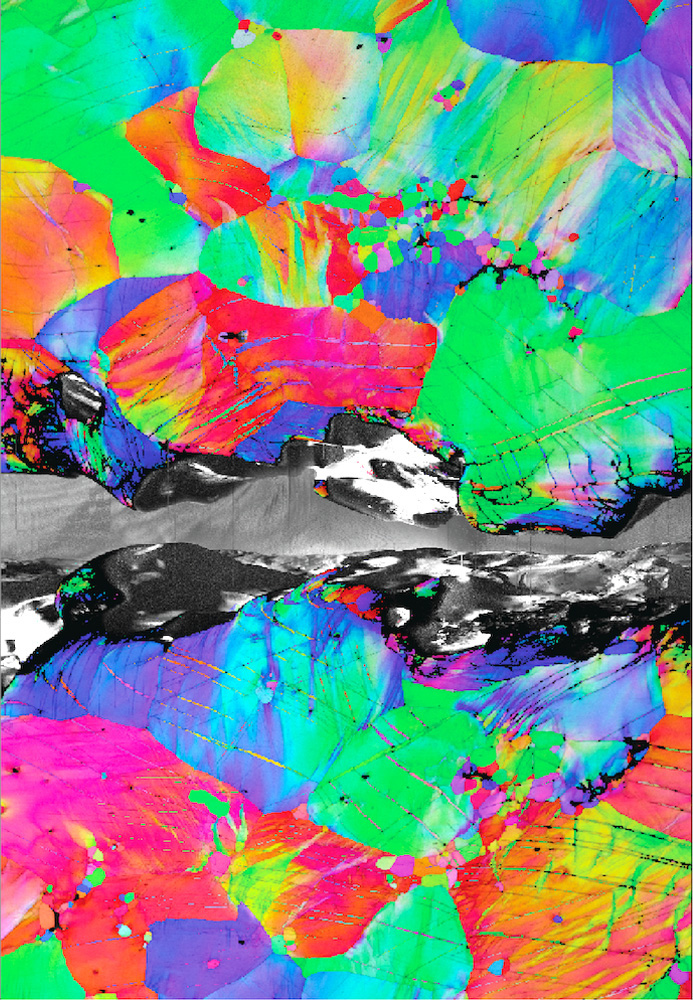
Cette carte montre les bandes de réseau formées près du fond de fissure lors d'un test de propagation de fissure (de gauche à droite) dans l'alliage à -196°C. Crédit : Laboratoire de Berkeley
Pour comprendre ce qui se passait à l'intérieur du métal exquis, le co-chercheur Andrew Minor et son équipe ont analysé les échantillons soumis à des contraintes, ainsi que des échantillons témoins non pliés et non fissurés, à l'aide d'un microscope électronique à balayage tridimensionnel (4D-STEM) et d'un microscope électronique à balayage ( STEM) au Centre national de microscopie électronique, qui fait partie de la fonderie moléculaire du Berkeley Lab.
Les données du microscope électronique ont révélé que la dureté inhabituelle de l'alliage provient d'un effet secondaire inattendu d'un défaut rare appelé bande pliée. Des bandes de nœuds se forment dans un cristal lorsqu'une force appliquée provoque l'effondrement soudain des segments du cristal sur eux-mêmes et leur courbure. La direction dans laquelle le cristal se courbe dans ces brins augmente la force ressentie par les dislocations, les rendant ainsi plus faciles à déplacer. Au niveau de la masse, ce phénomène provoque un ramollissement du matériau (ce qui signifie que moins de force doit être appliquée sur le matériau lors de sa déformation). L'équipe savait, grâce à des recherches antérieures, que des bandes de nœuds se formaient facilement dans le RMEA, mais ils ont émis l'hypothèse que l'effet adoucissant rendrait le matériau moins rigide en facilitant la propagation des fissures à travers le réseau. Mais en réalité, ce n’est pas le cas.
« Nous avons montré, pour la première fois, que dans le cas d'une fissure brutale entre des atomes, les bandes de torsion résistent réellement à la propagation des fissures en répartissant les dommages loin d'elles, empêchant ainsi la fracture et entraînant une ténacité inhabituellement élevée », a déclaré Cook.
N.-B.45Ta25T15Haute fréquence15 Les alliages devront subir des recherches plus fondamentales et des tests techniques avant de réaliser quelque chose comme une turbine à réaction ou EspaceX La tuyère de la fusée en est fabriquée, a déclaré Ritchie, car les ingénieurs en mécanique doivent vraiment comprendre en profondeur les performances de leurs matériaux avant de les utiliser dans le monde réel. Cependant, cette étude suggère que le métal a le potentiel pour construire les moteurs du futur.
Référence : « Les bandes pliées améliorent la résistance exceptionnelle à la rupture dans l'alliage réfractaire à entropie moyenne NbTaTiHf » par David H. Cook, Punit Kumar, Madelyn I. Payne, Calvin H. Belcher, Pedro Borges, Wenqing Wang, Flynn Walsh, Zehao Li, Arun Devaraj , Mingwei Zhang, Mark Asta, Andrew M. Minor, Enrique J. Lavernia, Deran Abelian et Robert O. Richie, 11 avril 2024, les sciences.
est ce que je: 10.1126/science.adn2428
Cette recherche a été menée par David H. Cook, Puneet Kumar et Madeleine I. Payne et Calvin H. Belcher, Pedro Borges, Wenqing Wang, Flynn Walsh, Zihao Li, Arun Devaraj, Mingwei Zhang, Mark Asta, Andrew M. Minor et Enrique. J. Lavernia, Deran Abelian et Robert O. Ritchie, des scientifiques du Berkeley Lab, de l'UC Berkeley, du Pacific Northwest National Laboratory et de l'UC Irvine, avec un financement du Bureau des sciences du ministère de l'Énergie. L'analyse expérimentale et informatique a été réalisée à la Fonderie Moléculaire et au Centre Informatique Scientifique National de Recherche Énergétique, deux installations utilisatrices du Bureau des Sciences du Département de l'Énergie.
« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »

Quand j’ai entendu parler de cela, j’ai ressenti un pincement au cœur. Au cours de la dernière année, j'ai utilisé un service haut débit 4G modeste et j'ai obtenu au mieux 20 Mbps, mais la mission Psyché de la NASA a quand même obtenu 23 Mbps sur une distance de 225 millions de kilomètres ! Tout cela est dû au modèle du système de transmission optique utilisé dans la sonde. Cela signifie qu'elle peut obtenir un taux de transfert de données jusqu'à 100 fois supérieur à celui d'une radio ordinaire.
La mission Pysche de la NASA est en passe d'explorer, sans surprise, l'astéroïde riche en métaux situé entre les orbites de Mars et Jupiter, appelé Psyché. La chose intéressante à propos de l’astéroïde est qu’il semble être le noyau riche en fer d’une planète non formée. Le vaisseau spatial transportait une large gamme d'instruments scientifiques pour explorer l'astéroïde, notamment un imageur, un spectromètre à rayons gamma et à neutrons, un magnétomètre et une plate-forme gravitationnelle en bande X.
Son voyage de deux ans a commencé le 13 octobre avec sa destination, un petit monde qui pourrait nous aider à percer certains des secrets de la formation de notre système solaire. La théorie selon laquelle Psyché est un noyau planétaire défaillant n'est pas confirmée, ce sera donc l'un des objectifs de sa première mission ; Était-ce simplement du métal non fondu ou était-ce un noyau ? Pour comprendre cela, il faut connaître son âge. En plus de l'origine, d'autres objectifs sont d'explorer la formation et sa topographie à la surface.
L'astéroïde de Sotchi a été découvert en mars 1852 par l'astronome italien Annibale de Gasparis. Parce qu'il l'a découvert, il a été autorisé à lui donner un nom et a choisi Psyché, d'après la déesse grecque de l'âme. Il tourne autour du soleil à une distance allant de 378 millions à 497 millions de kilomètres, et il lui faut environ 5 années terrestres pour terminer son cycle. En forme de pomme de terre, ou peut-être plus précisément classée comme « irrégulière », il s’agit en fait d’une petite forme ellipsoïde qui mesure 280 kilomètres de large dans sa partie la plus large et 232 kilomètres de long.
Le système de communication expérimental est peut-être plus intéressant que les cibles (même si j'ai hâte d'en apprendre davantage sur cet astéroïde fascinant). La technologie DSOC (Deep Space Optical Communications) nouvellement développée n’est pas la principale plate-forme de communication mais existe sous forme de prototype.
Le système optique, qui repose sur la technologie laser, a réussi à transmettre des données techniques sur une distance de 226 millions de kilomètres. Le plus impressionnant peut-être est que le vaisseau spatial a démontré qu'il est capable de transmettre à un débit de 267 mégabits par seconde (oui, vous avez bien lu, un peu plus d'un quart de gigabit par seconde !). L'incroyable vitesse de téléchargement a été atteinte le 11 décembre. L'année dernière, lorsqu'une connexion haut débit de 15 secondes a été établie, une vidéo haute définition a été envoyée sur Terre. Malheureusement, à mesure que le vaisseau spatial recule, sa capacité à transmettre des données diminuera. Cela reste cependant bien meilleur que les connexions sans fil classiques.
Grâce à un puissant laser modulé, le laboratoire du télescope de communications optiques en Californie pourra envoyer des données à faible débit à Psyché. Pour recevoir les données, un récepteur de comptage de photons a été installé à l'observatoire Caltech Palomar pour capturer les informations envoyées par le vaisseau spatial. La communication a toujours été un défi majeur dans l’exploration spatiale, et même si nous ne pouvons pas réduire le temps de transit des données, nous pouvons améliorer la quantité de données envoyées à tout moment. Un grand pas en avant dans l’exploration spatiale.
« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »
science
Des satellites surveillent des groupes d' »araignées » répartis dans une ville inca sur Mars
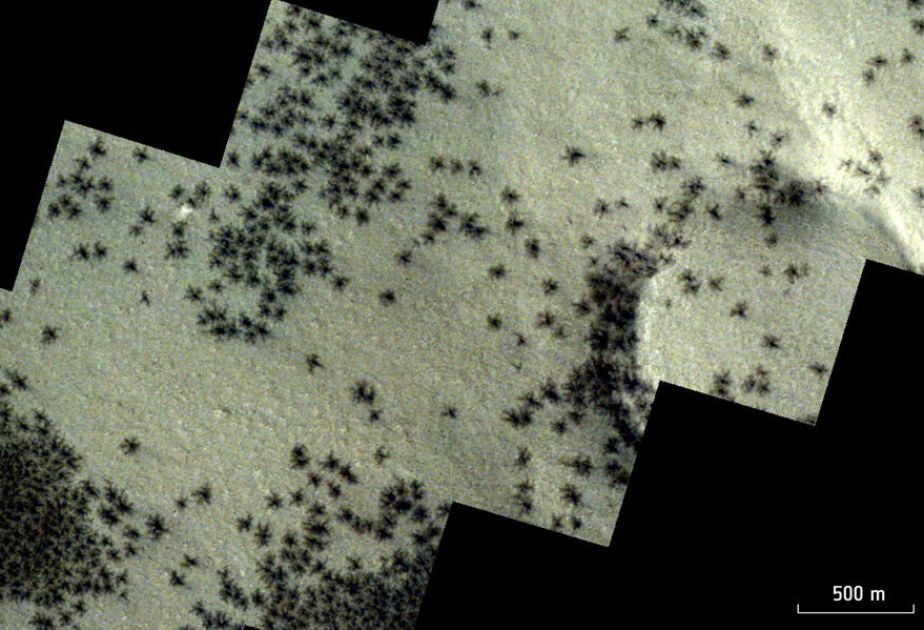
Des caractéristiques saisonnières ressemblant à des araignées ont été repérées poussant à travers les fissures de la surface de Mars. Azerbaïdjanactualités Citation de rapports Site Space.com.
Le vaisseau spatial Mars Express de l'Agence spatiale européenne a capturé de nouvelles images de petites structures sombres ressemblant à des araignées se précipitant dans une région de Mars connue sous le nom de Cité Inca, près du pôle sud de la planète rouge.
Ce phénomène apparaît lorsque la lumière du soleil printanière réchauffe les couches de dioxyde de carbone déposées pendant le sombre hiver martien. À son tour, la glace de dioxyde de carbone dans la couche inférieure se transforme en gaz, qui s'accumule et finit par briser la glace sus-jacente qui mesure jusqu'à 1 mètre d'épaisseur, selon un communiqué de l'Agence spatiale européenne.
Le gaz qui s'échappe transporte la poussière sombre du sol vers le haut, forçant finalement la poussière à sortir des couches supérieures de glace comme l'eau d'un geyser avant de se déposer à la surface. Cela crée des formations d'araignées fracturées de 0,03 à 0,6 miles (45 mètres à 1 kilomètre) de largeur.
La cité inca de Mars, officiellement connue sous le nom de Labyrinthe d'Angostos, présente une grille linéaire presque géométrique de collines comme les monuments incas sur Terre. Il fait partie d'une formation circulaire d'environ 86 km de large, ce qui suggère qu'il pourrait s'agir d'un cratère d'impact strié formé par de la lave s'élevant à travers la croûte fracturée de Mars et s'érodant au fil du temps.
« Nous ne savons toujours pas exactement comment la ville inca s'est formée », ont déclaré les responsables de l'ESA dans le communiqué. « Les dunes auraient pu se transformer en pierre au fil du temps. Peut-être que des matériaux tels que du magma ou du sable se sont infiltrés à travers des feuilles brisées de roche martienne. Ou encore les crêtes pourraient être des structures dentelées associées aux glaciers. »
Les dernières images de la cité inca ont été capturées par la caméra stéréo haute résolution (HRSC) de Mars Express le 27 février 2024, pendant la saison d'automne martienne. L'instrument Cassis (Color and Surface Imaging System) à bord de l'ExoMars Trace Gas Orbiter de l'ESA a documenté les mêmes caractéristiques en forme d'araignée près du pôle sud de Mars le 4 octobre 2020. Le prochain équinoxe de printemps martien aura lieu le 12 novembre 2024.
—
Suivez-nous sur Twitter @AzerNewsAz
« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »
-

 entertainment2 ans ago
entertainment2 ans agoDécouvrez les tendances homme de l’été 2022
-

 Top News2 ans ago
Top News2 ans agoFestival international du film de Melbourne 2022
-
 Tech1 an ago
Tech1 an agoVoici comment Microsoft espère injecter ChatGPT dans toutes vos applications et bots via Azure • The Register
-
science2 ans ago
Les météorites qui composent la Terre se sont peut-être formées dans le système solaire externe
-
science3 ans ago
Écoutez le « son » d’un vaisseau spatial survolant Vénus
-
Tech2 ans ago
F-Zero X arrive sur Nintendo Switch Online avec le multijoueur en ligne • Eurogamer.net
-
entertainment1 an ago
Seven révèle son premier aperçu du 1% Club
-
entertainment1 an ago
Centenaire des 24 Heures – La musique live fournit une bande-son pour la course