science
Forage réussi ! La NASA va explorer Mars
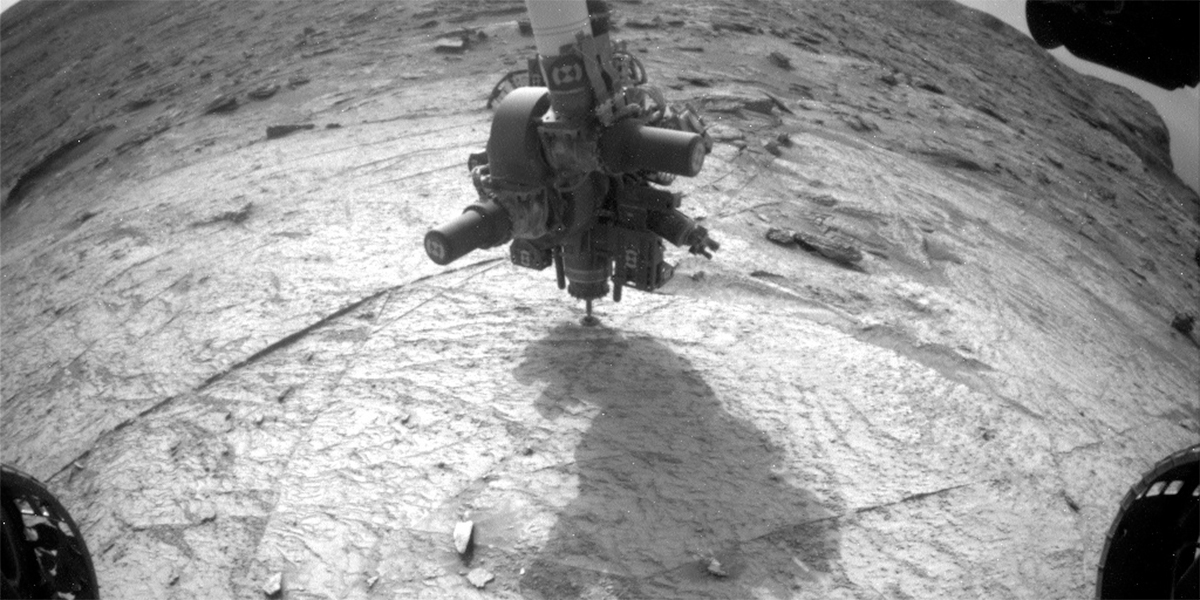
Cette image a été prise par la caméra d’évitement de danger avant (Front Hazcam) à bord du vaisseau spatial Curiosity de la NASA au Sol 3512 (2022-06-23 19:00:25 UTC). Crédit : NASA/JPL-Caltech. Télécharger l’image ›
L’équipe MSL est très heureuse aujourd’hui, car la première tentative de manœuvre depuis lors novembre dernier C’était réussi ! Ce Hazcam . Trentenaire image Montre le trépan extrait du nouveau trou de forage, qui est entouré de résidus de forage comme prévu. C’est l’une des nombreuses fois dans la mission MSL que les fosses ont dû être repensées pour surmonter l’anomalie, a de nouveau nécessité beaucoup de planification et de tests minutieux avec des appareils de forage presque identiques au JPL. Félicitations à l’équipe de résolution des problèmes d’anomalies et merci pour tout le bon travail qui a permis de creuser à nouveau ! Le forage est nécessaire pour obtenir des échantillons de roche et les livrer aux instruments de laboratoire SAM et CheMin à l’intérieur du rover, c’est donc un jour de fête pour l’équipe scientifique de MSL.
Mais avant que tout échantillon ne soit livré à CheMin ou SAM, nous devrions voir les résultats de la caractérisation des portions d’échantillons de forage qui était prévue mercredi dernier. Ces résultats ne seront pas retransmis sur Terre à temps pour planifier les Sols 3514 à 3516, donc le plan de ce week-end comprend plusieurs observations de télédétection et environnementales, y compris plus d’images Mastcam et Navcam du terrain à l’est et à l’ouest du rover à différents moments de Aujourd’hui, un meilleur échantillonnage de la géométrie observée est nécessaire pour contraindre le comportement photosynthétique des matériaux de surface. Ces observations optiques sont utiles pour déterminer les propriétés de diffusion et la rugosité des roches, des sols et des poussières à la surface. ChemCam sera également occupé, avec des points LIBS traçant chaque jour martien, pour les cibles « Magna Brava » (roche mère locale), « Rio Uraricoera » (veine) et « Wiapri » (roche sombre). Mastcam documentera les emplacements LIBS sur chacune de ces cibles, et le matin du SOL 3514, il obtiendra une mosaïque stéréo 12×2 pour étendre la couverture des structures sédimentaires à Marbura Hill et une observation multispectrale des sols perturbés à ‘Kamana’. Cet après-midi-là, Navcam et Mastcam examineront les propriétés de la poussière dans l’atmosphère et Mastcam disposera de deux autres mosaïques holographiques, « Amacuro » et « Deepdale ».
Au Sol 3515, Mastcam et Navcam mesureront la quantité de poussière dans l’atmosphère et Navcam recherchera des diables de poussière et de nuages à plus grande échelle que d’habitude, avec plus de temps et d’énergie disponibles ce week-end. Navcam recherchera les nuages avant l’aube et Mastcam mesurera la quantité de poussière au-dessus du rover plus tard le lendemain matin. Navcam cherchera à nouveau des démons de poussière et de nuage plus tard que Sol. Le rover se réveillera avant l’aube sur Sol 3517 pour permettre à la Navcam de rechercher les nuages. Plus tard dans la matinée, Mastcam et Navcam mesureront la teneur en poussière dans l’atmosphère avant que Navcam ne recherche à nouveau les nuages. REMS et DAN surveilleront également les conditions environnementales pendant le plan du week-end. MSL sera donc occupé en attendant des nouvelles des spécifications des pièces d’échantillon !

« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »
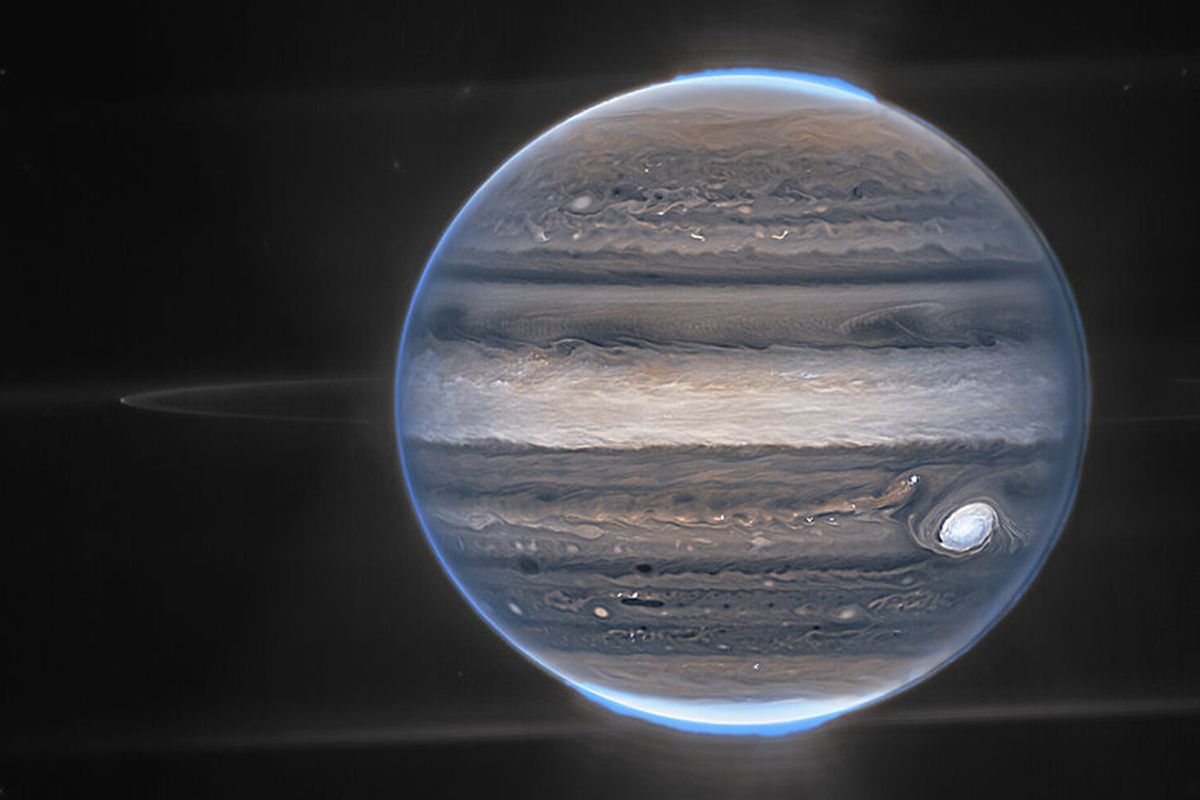
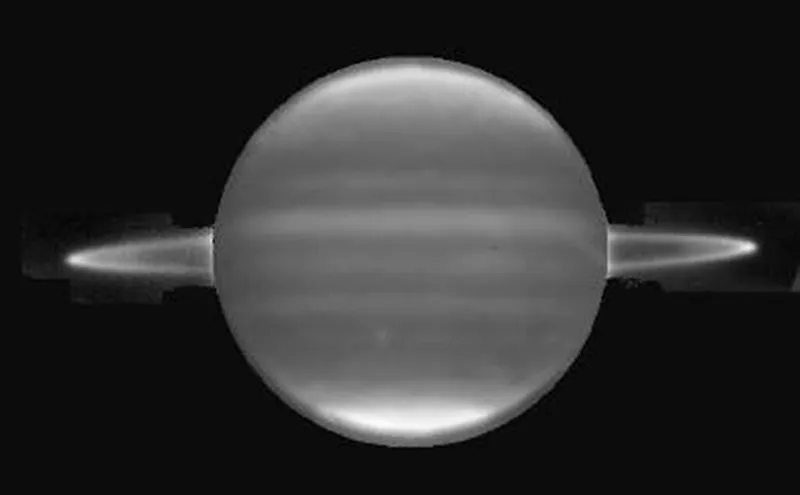
Nous connaissons tous les anneaux magiques de Saturne, mais Jupiter a-t-il des anneaux ? Oui elle est comme ça.
Eh bien, Jupiter n'a pas de grands anneaux clairement définis comme celui de Saturne, mais ils existent.
En fait, les anneaux de Jupiter sont si faibles qu'ils sont invisibles à l'œil nu et extrêmement difficiles à détecter, même avec des télescopes puissants. Mais ils sont bel et bien là.
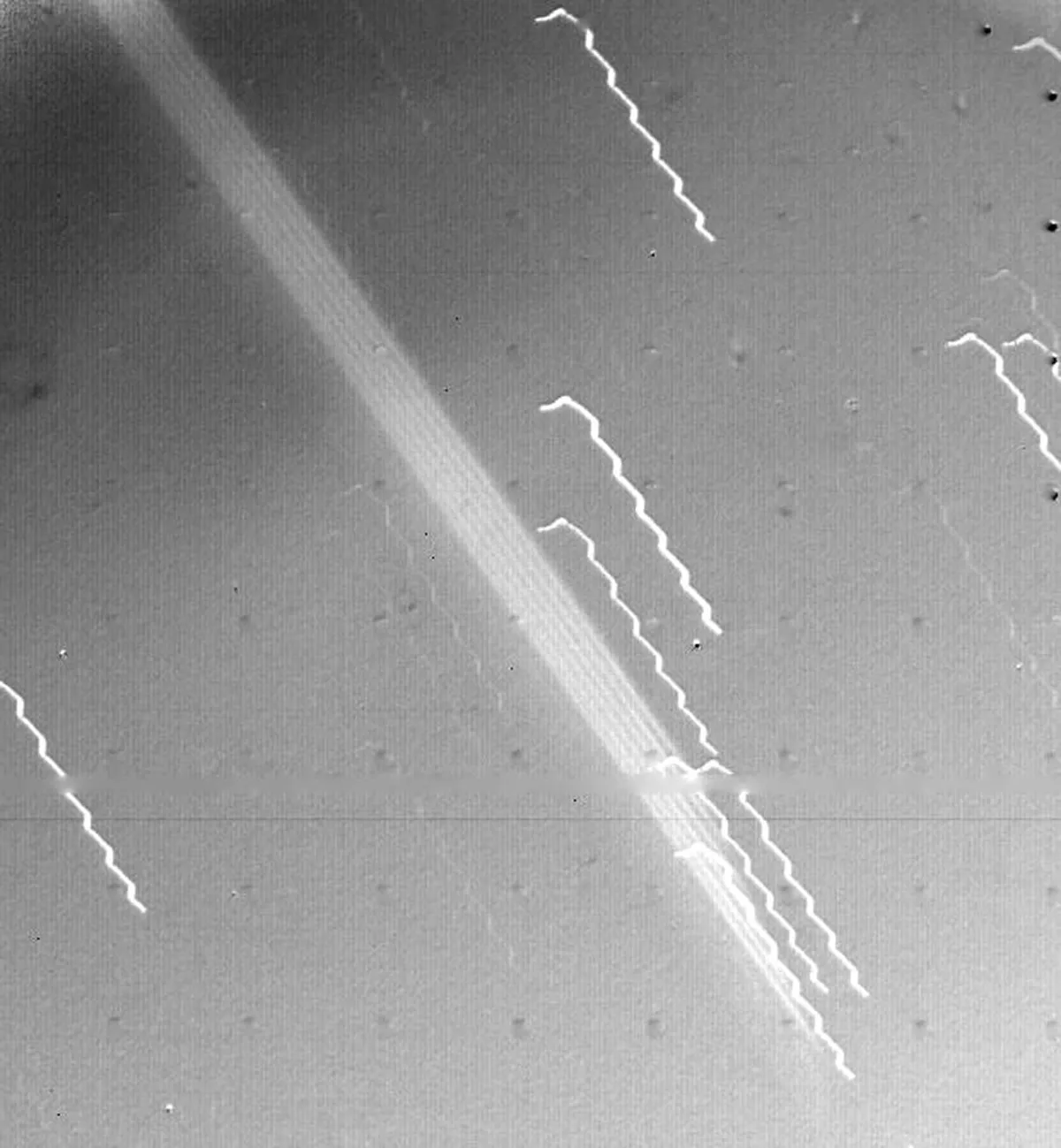
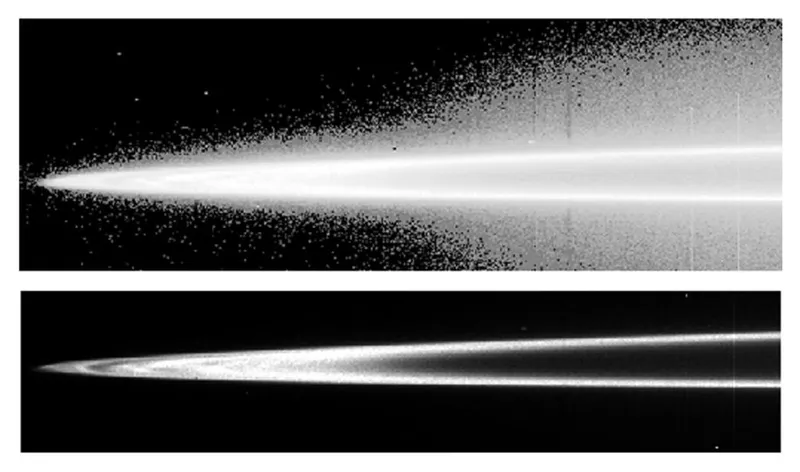
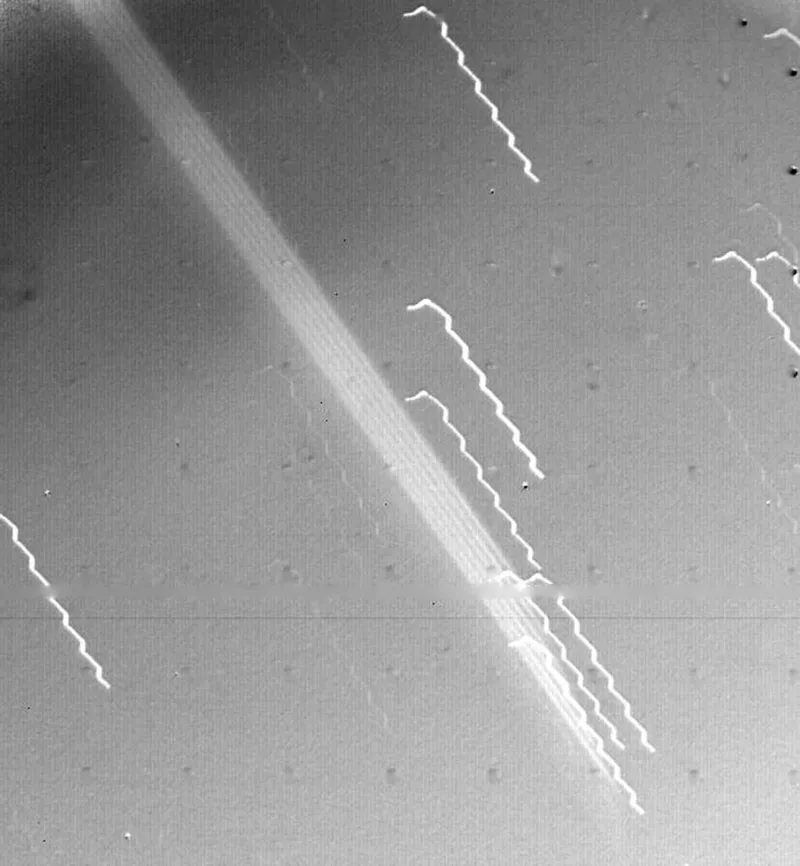
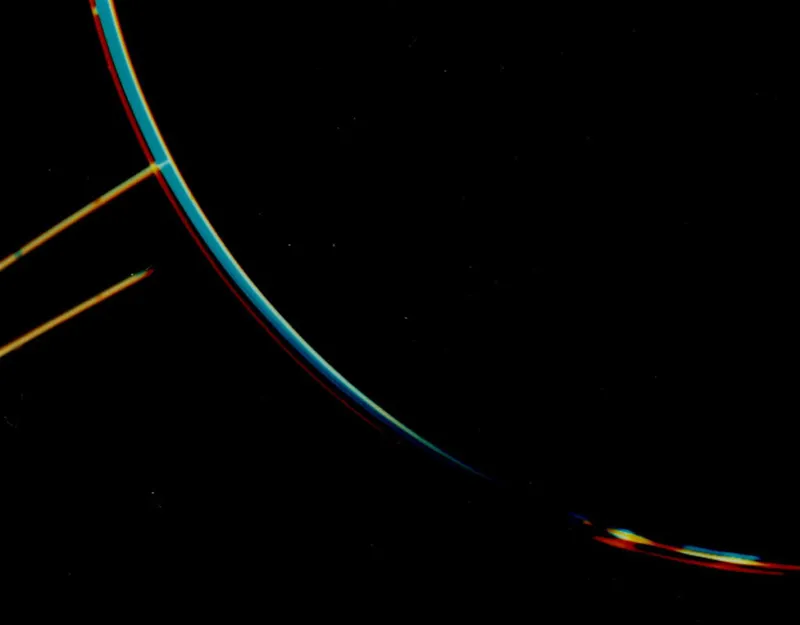
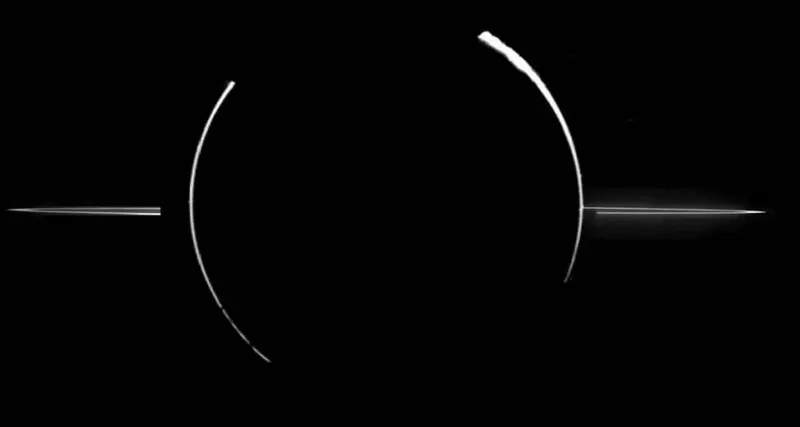
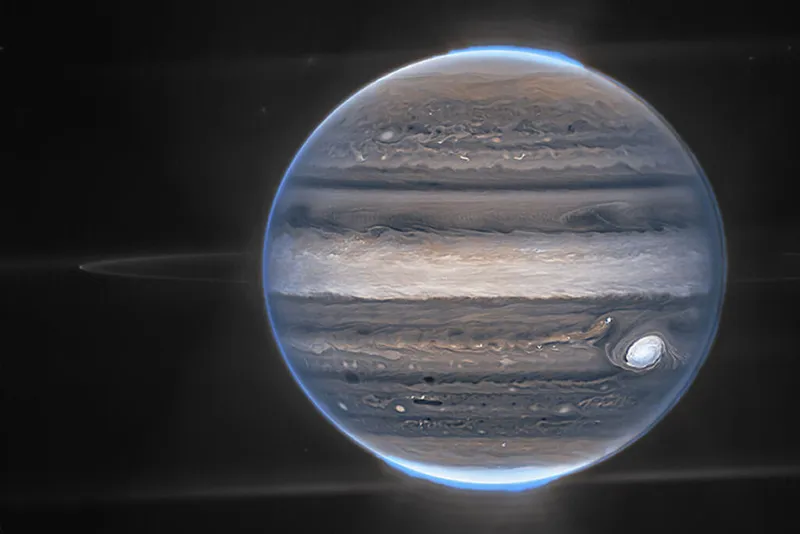
Ils ont été observés et photographiés par les vaisseaux spatiaux Voyager et Galileo, la mission Cassini, le télescope Keck et, plus récemment, par le télescope spatial James Webb.
Combien d’anneaux Jupiter a-t-il ?
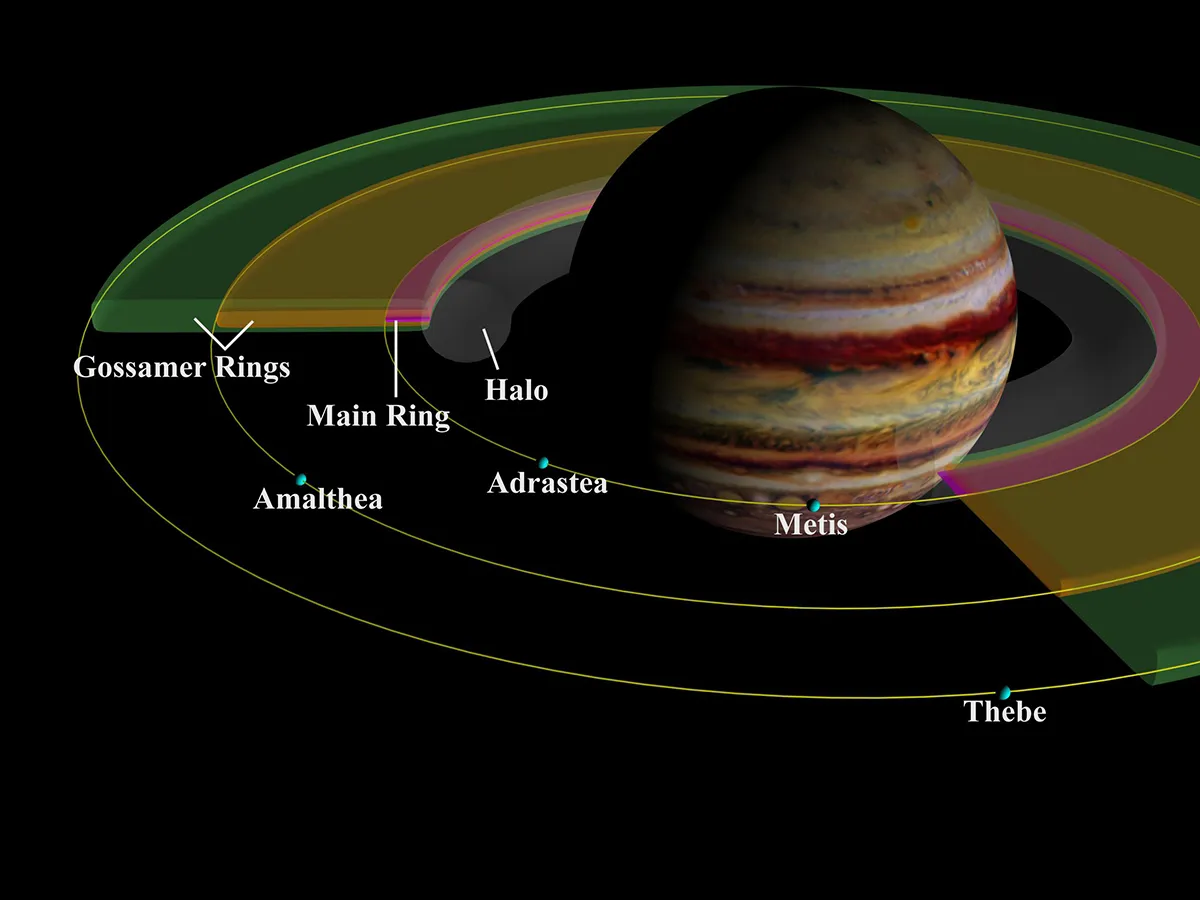
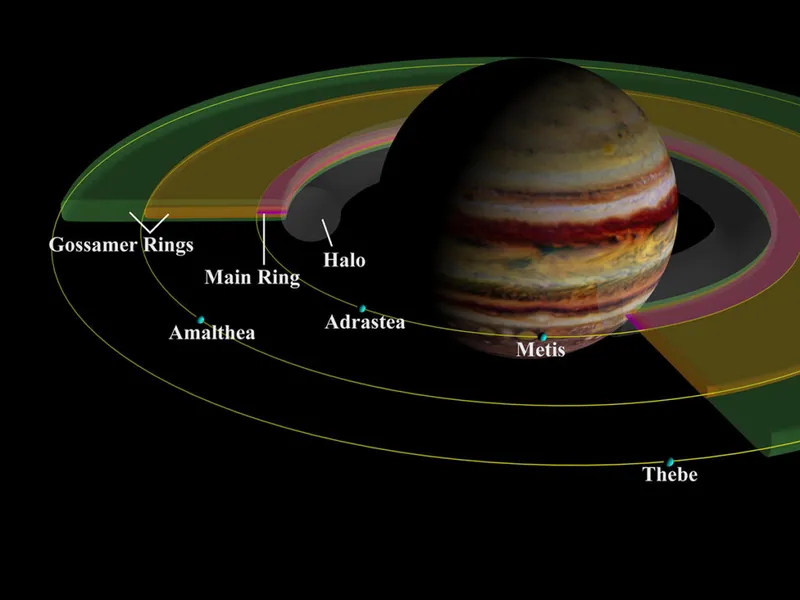
Jupiter possède quatre structures annulaires principales.
En regardant vers l'extérieur de la planète elle-même, il y a un épais « anneau corona » intérieur, d'une épaisseur de 12 500 km.
Puis « l'anneau principal » qui est très brillant et très fin, seulement 30 kilomètres d'épaisseur par endroits.
Et deux « anneaux fins » épais mais très ternes.
L'anneau aréolaire est de couleur neutre ou bleuâtre, tandis que les anneaux principal et filamenteux ont une couleur rougeâtre.
Formation des anneaux de Jupiter
On pense que les anneaux entourant Jupiter sont constitués de matériaux – principalement sous la forme de très fines particules de poussière – précédemment éjectés des lunes Metis et Adrastia à la suite de collisions avec des astéroïdes, des météorites ou des comètes.
La question de savoir si les anneaux sont aussi vieux que Jupiter lui-même ou s'ils se sont formés plus tard est une question à laquelle on n'a pas encore répondu.
Découverte
Les anneaux de Jupiter sont si faibles que nous n'avions aucune idée de leur existence jusqu'à ce que les images soient renvoyées par la sonde spatiale Voyager 1 en 1979.
Ce que nous en savons aujourd'hui provient principalement des images supplémentaires réalisées par les missions Galileo et Cassini de la NASA à la fin des années 1990 et au début des années 2000, ainsi que des observations faites par le télescope spatial Hubble et le télescope Keck au sol.
Les scientifiques pensent maintenant que c'est la gravité des quatre grandes lunes galiléennes de Jupiter (Ganymède, Callisto, Io et Europe) qui a empêché Jupiter de former de grands anneaux sophistiqués comme ceux entourant sa voisine géante gazeuse, Saturne.
Photos des anneaux de Jupiter
« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »
science
Les astronautes sont ravis d'effectuer le premier vol d'essai à bord du vaisseau spatial Starliner de Boeing

Deux astronautes vétérans se sont rendus au Centre spatial Kennedy jeudi après-midi pour préparer le premier lancement d'essai du vaisseau spatial Starliner de Boeing, un vol très attendu depuis des années. En retard Après deux Vols d'essai sans pilote Et un travail approfondi pour résoudre une variété de problèmes techniques.
Les astronautes Barry « Butch » Wilmore et Sunita Williams, deux des astronautes les plus expérimentés de la NASA avec quatre vols spatiaux précédents, 11 sorties dans l'espace et 500 jours en orbite entre ces périodes, ont atterri sur la piste de 3 miles de long du port spatial à bord d'un avion d'entraînement à réaction T-38. après le vol. Du Centre spatial Johnson à Houston.
NASA/Frank Michaud
« Nous aimons la Floride », a déclaré Wilmore aux journalistes sur la piste, « Nous aimons le Kennedy Space Center, parce que c'est là que vous lancez des gens dans l'espace. » « Dans moins de deux semaines, le prochain vol que nous prendrons se fera sur notre dos et prendra son envol. »
L'achèvement du vol d'essai de l'équipage Starliner, ou CFT, « augmentera la capacité (de la NASA) vers et depuis la station spatiale, et c'est essentiel », a-t-il déclaré. «Nous sommes ravis d'être ici.»
« C'est là que le caoutchouc rencontre la route », a déclaré Williams, « et là où nous quittons cette planète, et c'est plutôt cool ! »
Quelques heures après l'arrivée de l'équipage, et peu après que deux astronautes russes ont effectué une sortie dans l'espace de quatre heures et 36 minutes à l'extérieur de la Station spatiale internationale, les chefs de mission ont effectué un examen de préparation au vol de deux jours, autorisant provisoirement le lancement du véhicule Starliner à bord de l'avion. Véhicule de lancement uni. Fusée Alliance Atlas 5 à 22 h 34 HAE le lundi 6 mai.
Si tout va bien, Wilmore et WilliamsTous deux anciens pilotes d'essai de la Marine, ils accosteront à la station spatiale le 8 mai et reviendront sur Terre le 15 mai ou peu après. Si la mission se déroule bien, la NASA prévoit de commencer les vols opérationnels de rotation de l'équipage du Starliner en 2025, en alternance avec SpaceX.
« Aujourd'hui a été un grand jour pour notre programme d'équipage commercial », a déclaré Steve Stich, administrateur du CCP de la NASA. « Tous les partenaires (internationaux), puis toute notre équipe, ont mené une enquête préalable pour procéder au lancement le 6 mai. De plus, nous avons (signé) ce que nous appelons la qualification humaine provisoire pour Starliner pour ce vol avec équipage. test. C’était une grosse affaire pour la NASA et toute notre équipe.
Al-Ula
La NASA a attribué deux contrats pour le programme d'équipage commercial en 2014, l'un à SpaceX d'une valeur de 2,6 milliards de dollars et l'autre à Boeing d'une valeur de 4,2 milliards de dollars, pour stimuler le développement d'engins spatiaux autonomes capables de transporter des astronautes vers et depuis la Station spatiale internationale.
L’objectif était de mettre fin à la dépendance à l’égard du vaisseau spatial russe Soyouz après le retrait de la navette spatiale et de reprendre le lancement d’astronautes américains depuis le sol américain à bord de fusées et d’engins spatiaux américains. Il est tout aussi important pour la NASA de disposer de deux vaisseaux spatiaux indépendants pour les vols d'équipage vers la Station spatiale internationale au cas où le ferry d'une entreprise s'arrêterait avant la Terre pour une raison quelconque.
SpaceX a commencé les vols d'essai en mai 2020, lançant avec succès deux astronautes de la NASA lors d'un vol d'essai Crew Dragon vers la station spatiale. Depuis lors, SpaceX a lancé 50 astronautes, astronautes et civils en orbite sur huit vols opérationnels vers le complexe de laboratoires, trois visites commerciales et un vol financé par des fonds privés vers une orbite terrestre basse.
Boeing a lancé son Starliner dans un avion Vol d'essai sans pilote En décembre 2019, le vaisseau spatial a rencontré des problèmes logiciels et de communication majeurs qui se sont combinés pour entraver la tentative d'amarrage à la station spatiale et ont presque conduit à la destruction du vaisseau de l'équipage.
une Le deuxième vol sans pilote Il a été commandé (et payé par Boeing), mais lors de la fenêtre de lancement d'août 2021, les ingénieurs des fenêtres ont découvert des valves corrodées dans le système de propulsion du vaisseau spatial. La résolution de ce problème a retardé le deuxième vol d’essai jusqu’en mai 2022.
Bien que la mission ait été un succès, d'autres problèmes ont été découverts, notamment des problèmes de parachute et des inquiétudes concernant la possibilité que le ruban de protection enroulé autour du câblage interne s'enflamme. La correction de ces problèmes et la recherche d'une place pour la visite dans le programme de vol complexe de la station spatiale ont finalement retardé le test en vol de l'équipage au 6 mai.
Accorder Problèmes récents Avec des avions Boeing qui ont soulevé des questions sur l'entreprise Culture de sécuritéLe test en vol réussi de l'équipage est considéré par beaucoup comme une étape cruciale pour Boeing et le programme d'équipage commercial de la NASA.
Pour sa part, Wilmore a déclaré qu'il ne considérait pas le lancement du Starliner dans le contexte des problèmes de l'avion largement rapportés par Boeing.
NASA
« Je ne pense pas qu'il s'agisse nécessairement de Boeing ou d'un vol », a-t-il déclaré. « Ils sont tous d'une importance vitale. Il s'agit des vols spatiaux habités. Cet adage que vous avez entendu depuis Apollo 13, selon lequel l'échec n'est pas une option ? Cela n'a rien à voir spécifiquement avec Boeing ou ce programme. Ce sont toutes les choses que nous faisons dans l'espace humain. vol spatial. » .
« Donc, ce n’est ni plus ni moins important que tout ce que nous faisons », a-t-il déclaré. « Il se trouve que c'est la chose la plus importante que nous faisons en ce moment. »
« Le succès de cette mission a toujours été très important pour nous en tant que programme pour de nombreuses raisons », a reconnu Mark Nappi, responsable du programme Starliner de Boeing.
« Premièrement, nous avons des humains qui pilotent ce véhicule », a-t-il déclaré. « Nous prenons cela très au sérieux dans le domaine des vols spatiaux habités. J'ai passé ma carrière dans ce secteur et cela a toujours été en tête de liste. »
« Deuxièmement, il s'agit d'une capacité importante pour nous et pour la NASA, c'est pourquoi nous nous sommes engagés à le faire, et nous allons le faire et y parvenir. Je n'y pense donc pas en termes de ce qui est important pour Boeing. autant j'y pense en termes de ce qui est important pour ce programme, ce qui est important « Donner suite aux engagements que nous avons pris envers nos clients ».
« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »
science
La synthèse de deux nouveaux carbures offre une perspective sur la manière dont les structures carbonées complexes existent sur d'autres planètes
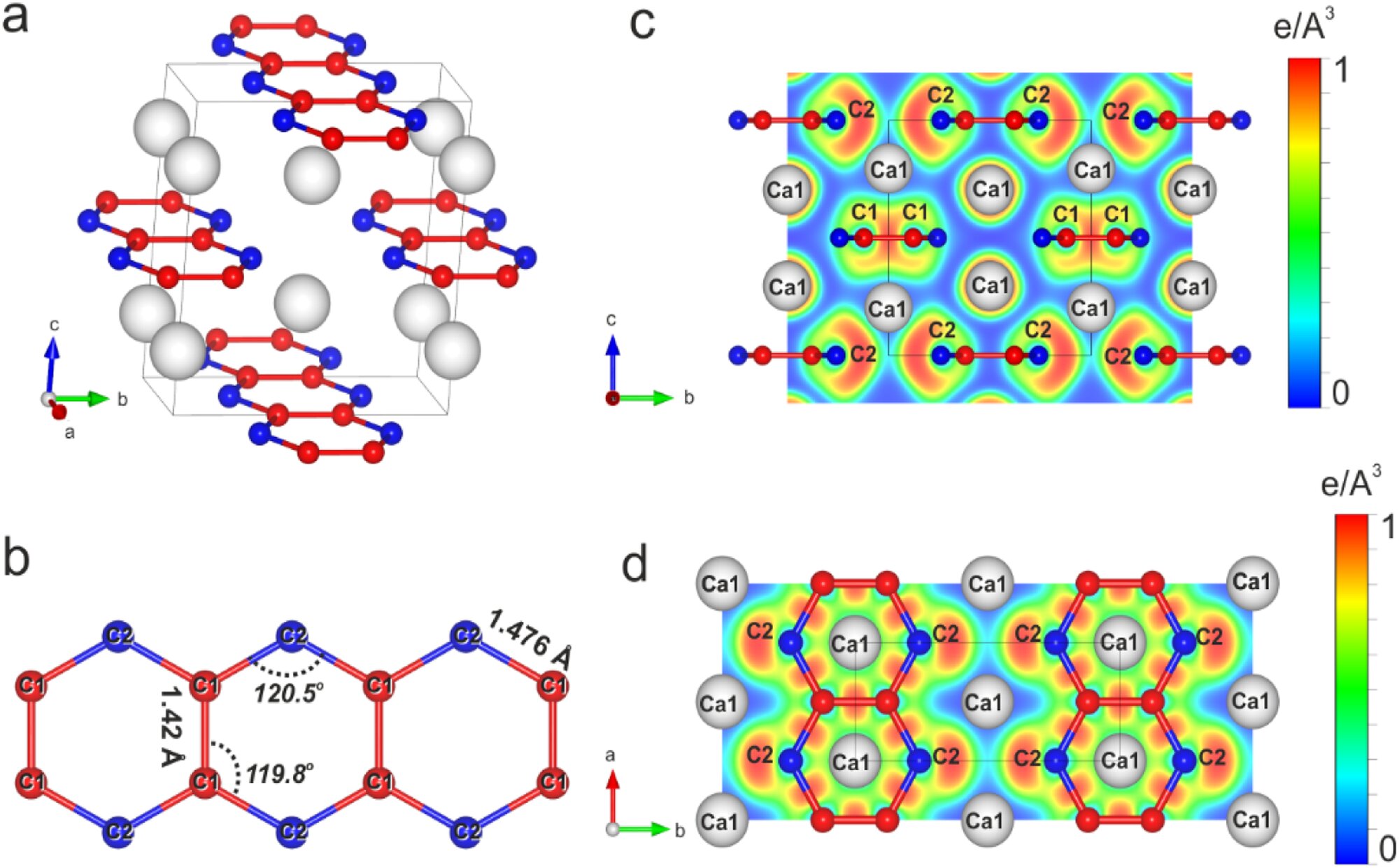
Structure cristalline de HP-CaC2 Avec une moyenne cumulative de 44(1). Modèle boule-et-bâton avec cellule unitaire définie ; Les atomes de calcium apparaissent sous forme de sphères blanches et les atomes de carbone sous forme de sphères rouges et bleues sur deux sites cristallographiques distincts, C1 (site Wyckoff de 4 g) et C2 (4 h), respectivement. (b) Géométrie d'un nanoruban polyacyne déprotoné ; Les distances C–C et les angles sont étiquetés CCC. Les coupes efficaces de la fonction de localisation électronique (ELF) calculée sont représentées dans des plans perpendiculaires (c) et parallèles (d) aux nanorubans de polyacène. crédit: Communications naturelles (2024). est ce que je: 10.1038/s41467-024-47138-2
× Fermer
Structure cristalline de HP-CaC2 Avec une moyenne cumulative de 44(1). Modèle boule-et-bâton avec cellule unitaire définie ; Les atomes de calcium apparaissent sous forme de sphères blanches et les atomes de carbone sous forme de sphères rouges et bleues sur deux sites cristallographiques distincts, C1 (site Wyckoff de 4 g) et C2 (4 h), respectivement. (b) Géométrie d'un nanoruban polyacyne déprotoné ; Les distances C–C et les angles sont étiquetés CCC. Les coupes efficaces de la fonction de localisation électronique (ELF) calculée sont représentées dans des plans perpendiculaires (c) et parallèles (d) aux nanorubans de polyacène. crédit: Communications naturelles (2024). est ce que je: 10.1038/s41467-024-47138-2
Des chercheurs de l'Université de Bayreuth ont acquis de nouvelles connaissances dans le domaine de la chimie du carbone à haute pression : ils ont synthétisé deux nouveaux carbures – des composés de carbone et d'un autre élément chimique – dotés de structures uniques. Les résultats pourraient fournir une explication inattendue de la répartition généralisée des hydrocarbures aromatiques polycycliques dans l’univers. La recherche est publié Dans le magazine Communications naturelles.
Les carbures sont des composés de carbone et d'un autre élément chimique. Les carbures nouvellement synthétisés ressemblent à des composés de type organométallique et pourraient fournir de nouvelles informations sur le comportement de structures carbonées complexes sous des pressions et des températures extrêmement élevées.
La possibilité de l’existence ou de la formation de tels composés dans les conditions intérieures de la planète pourrait avoir des implications importantes pour les sciences de la Terre et l’astrobiologie, où ils pourraient être à l’origine d’hydrocarbures et jouer un rôle dans l’origine de la vie.
Sous la direction du professeur Leonid Dobrovinsky de l'Institut géologique bavarois et du professeur Dr Natalia Dobrovinskaya du laboratoire de cristallographie de l'université de Bayreuth, des recherches sur de nouveaux composés carbonés révèlent qu'ils contiennent des éléments structurels similaires à ceux trouvés dans des composés complexes. composés organiques. Molécules, mais déprotonées (c'est-à-dire qu'elles ne contiennent pas d'hydrogène).
Pour y parvenir, les chercheurs ont utilisé des cellules à enclume en diamant qui ont compressé de minuscules cristaux de carbure de calcium à des pressions de l'ordre du gigapascal à trois chiffres et les ont simultanément chauffés à des températures d'environ 3 000 degrés Celsius. Ces conditions sont cohérentes avec celles trouvées à une profondeur de 2 900 km à l’intérieur de la Terre. Le changement de pression et de température a entraîné la formation de carbure de calcium en deux nouveaux carbures : le polymorphe haute pression de CaC2 Et la Californie3C7.
Structure cristalline du Ca3C7 Avec une moyenne cumulative de 38 (1). Projection de la structure de Ca3C7 le long de l'axe a, en se concentrant sur des chaînes 2D d'atomes de carbone alignées le long de l'axe b. Les atomes de calcium apparaissent sous forme de sphères blanches et les atomes de carbone sous forme de sphères rouges et bleues dans les deux positions cristallographiques distinctes C1 (4c) et C2 (8d), respectivement. Les atomes de carbone, appelés C3(8d) et C4(8d), sont représentés par des sphères grises. (b) Géométrie de la chaîne discrète semi-poly (indénoindène) (p-PInIn) étiquetée avec les distances C-C et les angles C-C-C. c, d Des coupes efficaces de la fonction de localisation électronique (ELF) calculée dans les deux plans différents contenant les chaînes p-PInIn sont présentées. crédit: Communications naturelles (2024). est ce que je: 10.1038/s41467-024-47138-2
× Fermer
Structure cristalline du Ca3C7 Avec une moyenne cumulative de 38 (1). Projection de la structure de Ca3C7 le long de l'axe a, en se concentrant sur des chaînes 2D d'atomes de carbone alignées le long de l'axe b. Les atomes de calcium apparaissent sous forme de sphères blanches et les atomes de carbone sous forme de sphères rouges et bleues dans les deux positions cristallographiques distinctes C1 (4c) et C2 (8d), respectivement. Les atomes de carbone, étiquetés C3(8d) et C4(8d), sont représentés par des sphères grises. (b) Géométrie de la chaîne discrète semi-poly (indénoindène) (p-PInIn) étiquetée avec les distances C-C et les angles C-C-C. c, d Montrer les sections efficaces de la fonction de localisation électronique (ELF) calculée dans les deux plans différents contenant les chaînes p-PInIn. crédit: Communications naturelles (2024). est ce que je: 10.1038/s41467-024-47138-2
Bien que le polymorphisme haute pression de CaC2 Il a la même composition chimique que la substance primaire, mais en diffère par la disposition spatiale des atomes et par ses propriétés chimiques. Le polymorphe possède des chaînes carbonées qui peuvent exister dans des conditions bien au-delà de celles connues pour exister dans les composés organiques conventionnels.
Il est possible que la formation de tels composés dans les conditions présentes à l’intérieur des planètes ait joué un rôle dans l’origine de la vie, car ils pourraient être à l’origine des hydrocarbures.
Le composé de formule chimique Ca3C7 Ils n’ont jamais été observés auparavant, leur synthèse et l’élucidation de leur structure représentent donc une avancée importante dans la compréhension du comportement des matériaux à base de carbone dans des conditions extrêmes.
« Nos découvertes repoussent non seulement les limites de la chimie connue du carbone, mais offrent également une nouvelle perspective sur la manière dont les structures complexes du carbone existent au plus profond de la Terre et peut-être sur d'autres planètes », a expliqué le professeur Leonid Dobrovinsky, chercheur principal de l'étude. Des cadavres. »
Le professeur Natalia Dobrovinskaya a ajouté : « Les similitudes entre ces carbures à haute pression et les composés organométalliques déprotonés ouvrent des possibilités passionnantes pour la conception de nouveaux matériaux dotés de propriétés électroniques, magnétiques et optiques uniques. »
Plus d'information:
Sayana Kandarkhayeva et al., Extension de la chimie du carbone à haute pression via la synthèse de CaC2 Et la Californie3C7 Avec du polyacène déprotoné et des nanorubans de type poly(indinoindine), Communications naturelles (2024). est ce que je: 10.1038/s41467-024-47138-2
« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »
-

 entertainment2 ans ago
entertainment2 ans agoDécouvrez les tendances homme de l’été 2022
-

 Top News2 ans ago
Top News2 ans agoFestival international du film de Melbourne 2022
-
 Tech1 an ago
Tech1 an agoVoici comment Microsoft espère injecter ChatGPT dans toutes vos applications et bots via Azure • The Register
-
science2 ans ago
Les météorites qui composent la Terre se sont peut-être formées dans le système solaire externe
-
science3 ans ago
Écoutez le « son » d’un vaisseau spatial survolant Vénus
-
Tech2 ans ago
F-Zero X arrive sur Nintendo Switch Online avec le multijoueur en ligne • Eurogamer.net
-
entertainment1 an ago
Seven révèle son premier aperçu du 1% Club
-
entertainment1 an ago
Centenaire des 24 Heures – La musique live fournit une bande-son pour la course