science
Un robot « sans cervelle » capable de naviguer dans des labyrinthes complexes
Des chercheurs de l’Université d’État de Caroline du Nord ont amélioré la conception d’un robot souple, lui permettant de naviguer dans des labyrinthes complexes sans guidage humain ou informatique. Le nouveau robot, fabriqué à partir de plastiques à cristaux liquides en forme de ruban, présente une conception asymétrique qui lui permet de tourner indépendamment et de se déplacer en arcs de cercle. Cette fonctionnalité lui évite de rester coincé entre les obstacles et lui permet de sortir des espaces restreints. Ces développements laissent entrevoir de futures applications pour les robots souples, en particulier lorsqu’ils peuvent exploiter la chaleur ambiante.
Les chercheurs ont amélioré la conception du robot logiciel, permettant une navigation autonome dans des labyrinthes complexes. Sa forme asymétrique lui permet de tourner indépendamment et empêche le coincement, ouvrant la voie à des applications innovantes de robots souples.
Les chercheurs qui ont créé un robot logiciel capable de naviguer dans des labyrinthes simples sans guidage humain ou informatique se sont maintenant appuyés sur ces travaux pour créer un robot logiciel « sans cervelle » capable de naviguer dans des environnements plus complexes et dynamiques.
« Dans nos travaux précédents, nous avons démontré que notre robot mou était capable de se déformer et de se retourner à travers une course d’obstacles très simple », explique Ji Yin, co-auteur d’un article sur ces travaux et professeur agrégé de génie mécanique et aérospatial. Ingénierie en Université d’État de Caroline du Nord. Cependant, il n’était capable de se transformer que s’il rencontrait un obstacle, ce qui signifiait concrètement que le robot pouvait parfois se coincer et sauter entre des obstacles parallèles.
Conception innovante et intelligence physique
« Nous avons développé un nouveau robot souple capable de tourner tout seul, lui permettant de se frayer un chemin à travers des labyrinthes sinueux et même de surmonter des obstacles en mouvement. Tout cela est réalisé en utilisant l’intelligence physique, plutôt que d’être guidé par un ordinateur.
L’intelligence corporelle fait référence à des objets dynamiques, tels que des robots mous, dont le comportement est régi par leur conception structurelle et leurs matériaux, plutôt que par un ordinateur ou une intervention humaine.

Les chercheurs qui ont créé un robot logiciel capable de naviguer dans des labyrinthes simples sans guidage humain ou informatique se sont maintenant appuyés sur ces travaux pour créer un robot logiciel « sans cervelle » capable de naviguer dans des environnements plus complexes et dynamiques. La moitié du robot est une barre de torsion qui s’étend en ligne droite, tandis que l’autre moitié est une barre de torsion plus serrée qui s’enroule également sur elle-même comme un escalier en colimaçon. Cette conception asymétrique signifie qu’une extrémité du robot exerce plus de force sur le sol que l’autre. Crédit : Ji Yin, Université d’État de Caroline du Nord
Mécanisme des matériaux et du mouvement
Comme pour la version précédente, les nouveaux robots souples sont constitués d’élastomères à cristaux liquides en forme de ruban. Lorsque les robots sont placés sur une surface à au moins 55 degrés ° C (131 degrés F), qui est plus chaud que l’air ambiant, de sorte que la partie du ruban en contact avec la surface rétrécit, tandis que la partie du ruban exposée à l’air ne le fait pas. Il en résulte un mouvement de roulement. Plus la surface est chaude, plus le robot tourne vite.
Cependant, alors que la version précédente du robot logiciel avait une conception symétrique, le nouveau robot comporte deux moitiés distinctes. La moitié du robot est un ruban torsadé qui s’étend en ligne droite, tandis que l’autre moitié est un ruban plus étroitement torsadé qui s’enroule également sur lui-même comme un escalier en colimaçon.
Cette conception asymétrique signifie qu’une extrémité du robot exerce plus de force sur le sol que l’autre. Pensez à un gobelet en plastique dont l’ouverture est plus large que sa base. Si vous le faites rouler sur la table, il ne roule pas en ligne droite : il forme un arc en traversant la table. Cela est dû à sa forme asymétrique.
Surmonter les limites de la conception
« Le concept derrière le nouveau robot est assez simple : en raison de sa conception asymétrique, il tourne sans avoir à toucher quoi que ce soit », explique Yao Zhao, premier auteur de l’article et chercheur postdoctoral à NC State. « Donc, même s’il change encore de direction quand il fait ça Faire Il entre en contact avec un objet – lui permettant de naviguer dans des labyrinthes – et ne peut pas rester coincé entre des objets parallèles. Au lieu de cela, sa capacité à se déplacer en arcs de cercle lui permet de se frayer un chemin librement.
Les chercheurs ont démontré la capacité de la conception souple et asymétrique du robot à naviguer dans des labyrinthes plus complexes – y compris des labyrinthes à parois mobiles – et à s’insérer dans des espaces plus étroits que la taille de son corps. Les chercheurs ont testé la nouvelle conception du robot sur une surface métallique et sur du sable. Une vidéo du robot asymétrique en action peut être trouvée ici :
« Ce travail constitue une nouvelle étape en nous aidant à développer des approches innovantes pour concevoir des robots logiciels, en particulier pour les applications dans lesquelles les robots logiciels seront capables de récupérer l’énergie thermique de leur environnement », explique Yin.
Référence : « Escape from the Physically Intelligent Soft Robot Maze » par Yao Zhao, Yawei Hong, Yanbin Li, Fangjie Qi, Haitao Qing, Hao Su et Ji Yin, 8 septembre 2023, Avancement de la science.
est ce que je: 10.1126/sciadv.adi3254
Le premier auteur de l’article est Yao Zhao, chercheur postdoctoral à NC State. Hao Su, professeur agrégé de génie mécanique et aérospatial à NC State, est co-auteur. Les autres co-auteurs incluent Yaoye Hong, un récent doctorat. Diplômé de l’État de Caroline du Nord. Yanbin Li, chercheur postdoctoral à NC State ; et Fangjie Qi et Haitao Qing, tous deux titulaires d’un doctorat. étudiants dans l’État de NC.
Le travail a été réalisé avec le soutien de la National Science Foundation dans le cadre des subventions 2005374, 2126072, 1944655 et 2026622.

« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »
science
Des satellites surveillent des groupes d' »araignées » répartis dans une ville inca sur Mars
Des caractéristiques saisonnières ressemblant à des araignées ont été repérées poussant à travers les fissures de la surface de Mars. Azerbaïdjanactualités Citation de rapports Site Space.com.
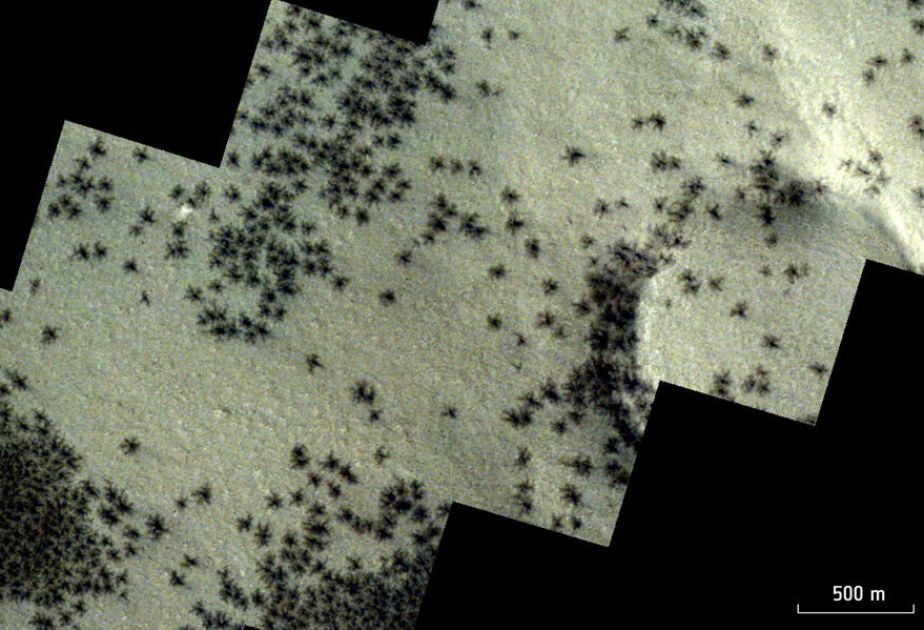
Le vaisseau spatial Mars Express de l'Agence spatiale européenne a capturé de nouvelles images de petites structures sombres ressemblant à des araignées se précipitant dans une région de Mars connue sous le nom de Cité Inca, près du pôle sud de la planète rouge.
Ce phénomène apparaît lorsque la lumière du soleil printanière réchauffe les couches de dioxyde de carbone déposées pendant le sombre hiver martien. À son tour, la glace de dioxyde de carbone dans la couche inférieure se transforme en gaz, qui s'accumule et finit par briser la glace sus-jacente qui mesure jusqu'à 1 mètre d'épaisseur, selon un communiqué de l'Agence spatiale européenne.
Le gaz qui s'échappe transporte la poussière sombre du sol vers le haut, forçant finalement la poussière à sortir des couches supérieures de glace comme l'eau d'un geyser avant de se déposer à la surface. Cela crée des formations d'araignées fracturées de 0,03 à 0,6 miles (45 mètres à 1 kilomètre) de largeur.
La cité inca de Mars, officiellement connue sous le nom de Labyrinthe d'Angostos, présente une grille linéaire presque géométrique de collines comme les monuments incas sur Terre. Il fait partie d'une formation circulaire d'environ 86 km de large, ce qui suggère qu'il pourrait s'agir d'un cratère d'impact strié formé par de la lave s'élevant à travers la croûte fracturée de Mars et s'érodant au fil du temps.
« Nous ne savons toujours pas exactement comment la ville inca s'est formée », ont déclaré les responsables de l'ESA dans le communiqué. « Les dunes auraient pu se transformer en pierre au fil du temps. Peut-être que des matériaux tels que du magma ou du sable se sont infiltrés à travers des feuilles brisées de roche martienne. Ou encore les crêtes pourraient être des structures dentelées associées aux glaciers. »
Les dernières images de la cité inca ont été capturées par la caméra stéréo haute résolution (HRSC) de Mars Express le 27 février 2024, pendant la saison d'automne martienne. L'instrument Cassis (Color and Surface Imaging System) à bord de l'ExoMars Trace Gas Orbiter de l'ESA a documenté les mêmes caractéristiques en forme d'araignée près du pôle sud de Mars le 4 octobre 2020. Le prochain équinoxe de printemps martien aura lieu le 12 novembre 2024.
—
Suivez-nous sur Twitter @AzerNewsAz
« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »

Boeing devrait lancer sa capsule Starliner dans l'espace le mois prochain, et elle sera pilotée par deux astronautes qualifiés de la National Aeronautics and Space Administration (NASA). NBC mentionné.
Les astronautes de la NASA Barry « Butch » Wilmore et Sunita Williams seront les premiers dans l'espace à bord du premier vol d'essai en équipage de Boeing vers la Station spatiale internationale (ISS) le 6 mai.
Ils sont arrivés jeudi au Kennedy Space Center de l'agence en Floride et y resteront jusqu'au lancement.
« C'est là que le caoutchouc rencontre la route, là où nous quittons cette planète, et c'est plutôt cool », a déclaré Williams lors d'une conférence de presse après son arrivée.
Des astronautes vétérans et d’anciens pilotes d’essai de l’US Navy ont été sélectionnés par la NASA en 2022.
Wilmore, originaire du Tennessee et commandant de mission, a effectué deux vols spatiaux précédents, passant 178 jours dans l'espace.
Il a piloté la navette spatiale Atlantis jusqu'à la station spatiale en 2009 et s'est lancé en orbite à bord d'un vaisseau spatial russe Soyouz en 2014 en tant que membre de l'équipage de l'Expédition 41.
Williams, originaire du Massachusetts, est le pilote de mission qui a déjà effectué deux séjours à bord de la Station spatiale internationale, totalisant 322 jours dans l'espace.
Elle s’est d’abord envolée vers la Station spatiale internationale à bord de la navette spatiale Discovery et y est restée environ six mois.
En 2012, Williams est retourné dans l’espace à bord d’un vaisseau spatial Soyouz de fabrication russe, où il est resté environ quatre mois.
Les astronautes vont désormais passer la semaine prochaine à travailler sur des exercices de préparation et d'entraînement de dernière minute, selon la NASA.
Si l’équipage parvient à la Station spatiale internationale, il y passera environ une semaine avant de retourner sur Terre.
« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »

Prise par un astronaute à bord de la Station spatiale internationale oblique – oblique Une photo des monts Salomon, au centre du Pakistan. Cette amplitude est due à la lente collision des plaques tectoniques indienne et eurasienne qui a commencé il y a environ 60 millions d'années. Les sommets s'élèvent à plus de 3 000 mètres (10 000 pieds) au-dessus du niveau de la mer dans la partie nord de la chaîne de montagnes, comme le montre cette image.
Les monts Salomon forment une barrière naturelle entre les plateaux à l'ouest et la vallée de l'Indus à l'est. Les vents soufflant de l'océan Indien et de la plaine inondable de l'Indus transportent l'humidité et les particules vers l'intérieur des terres, provoquant des inondations. Un mélange de brume, de brume et de nuages Se former du côté sous le vent de la chaîne de montagnes.
Les nuages et le brouillard ne peuvent pas traverser les terrains montagneux de haute altitude. Flux forcé du terrain Au lieu de cela, des conduits d'air autour de la cuisinière. Cependant, un petit courant de vapeur peut être vu passer à travers des brèches dans la barrière près de la ville de Dana Sar, où il traverse une vallée de montagne.
Une caractéristique unique de la photographie des astronautes de la Terre est la capacité des membres de l'équipage à mettre en valeur les caractéristiques du paysage en prenant des photos de Attentes – Opinions Autre que le rectum (anadir). Cette photo profite de la vue oblique pour mettre en valeur la robustesse des monts Salomon en mettant en valeur les ombres créées par le terrain.
Photo d'un astronaute ISS070-E-42565 Acquis le 17 décembre 2023 avec un appareil photo numérique Nikon D5 utilisant une focale de 460 mm. Il est fourni par l’installation d’observation de la Terre de l’équipage de la Station spatiale internationale et l’unité des sciences de la Terre et de télédétection du Johnson Space Center. La photo a été prise par l'un des membres Equipage d'expédition 70. L'image a été recadrée et améliorée pour améliorer le contraste, et les éléments de lentille ont été supprimés. le Programme de la Station spatiale internationale Accompagne le laboratoire dans le cadre de Laboratoire national de l'ISS Aider les astronautes à prendre des images de la Terre qui seront d'une grande valeur pour les scientifiques et le public, et rendre ces images librement accessibles sur Internet. Des photos supplémentaires prises par les astronautes et les astronautes peuvent être consultées sur NASA/JSC Portail pour les photographies de la Terre par les astronautes. Commentaire de Kadan Cummings, Jacobs, contrat JETS II à la NASA-JSC.
« Spécialiste de la télévision sans vergogne. Pionnier des zombies inconditionnels. Résolveur de problèmes d’une humilité exaspérante. »
-

 entertainment2 ans ago
entertainment2 ans agoDécouvrez les tendances homme de l’été 2022
-

 Top News2 ans ago
Top News2 ans agoFestival international du film de Melbourne 2022
-
 Tech1 an ago
Tech1 an agoVoici comment Microsoft espère injecter ChatGPT dans toutes vos applications et bots via Azure • The Register
-
science2 ans ago
Les météorites qui composent la Terre se sont peut-être formées dans le système solaire externe
-
science3 ans ago
Écoutez le « son » d’un vaisseau spatial survolant Vénus
-
Tech2 ans ago
F-Zero X arrive sur Nintendo Switch Online avec le multijoueur en ligne • Eurogamer.net
-
entertainment1 an ago
Seven révèle son premier aperçu du 1% Club
-
entertainment1 an ago
Centenaire des 24 Heures – La musique live fournit une bande-son pour la course